Postdoctoral Research
Embedded Capacitive Sensing for Continuum Dexterous Manipulators
Oct 2021 - Aug 2022
ROS2 Sensors Design System Intergration
/ Overview
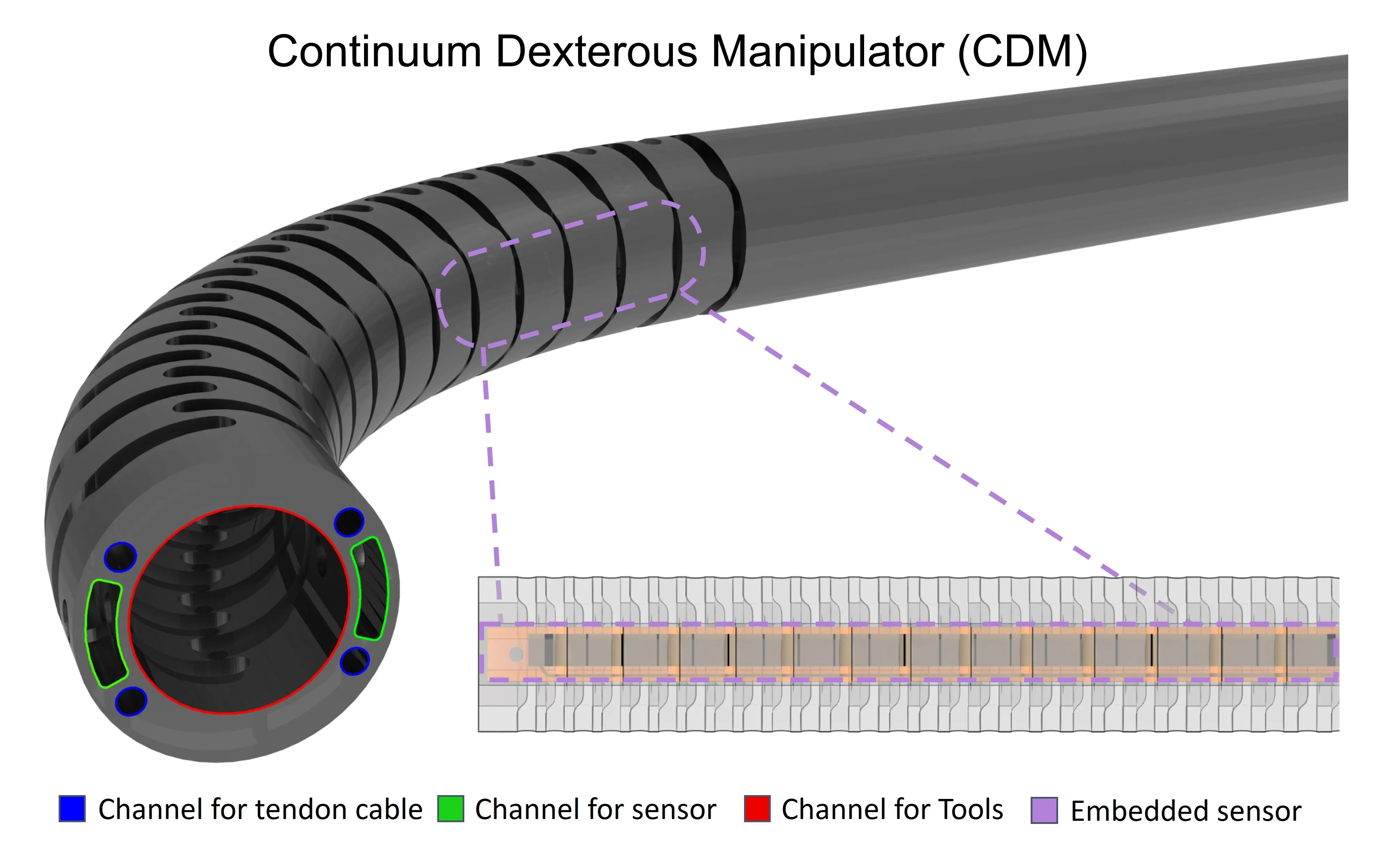
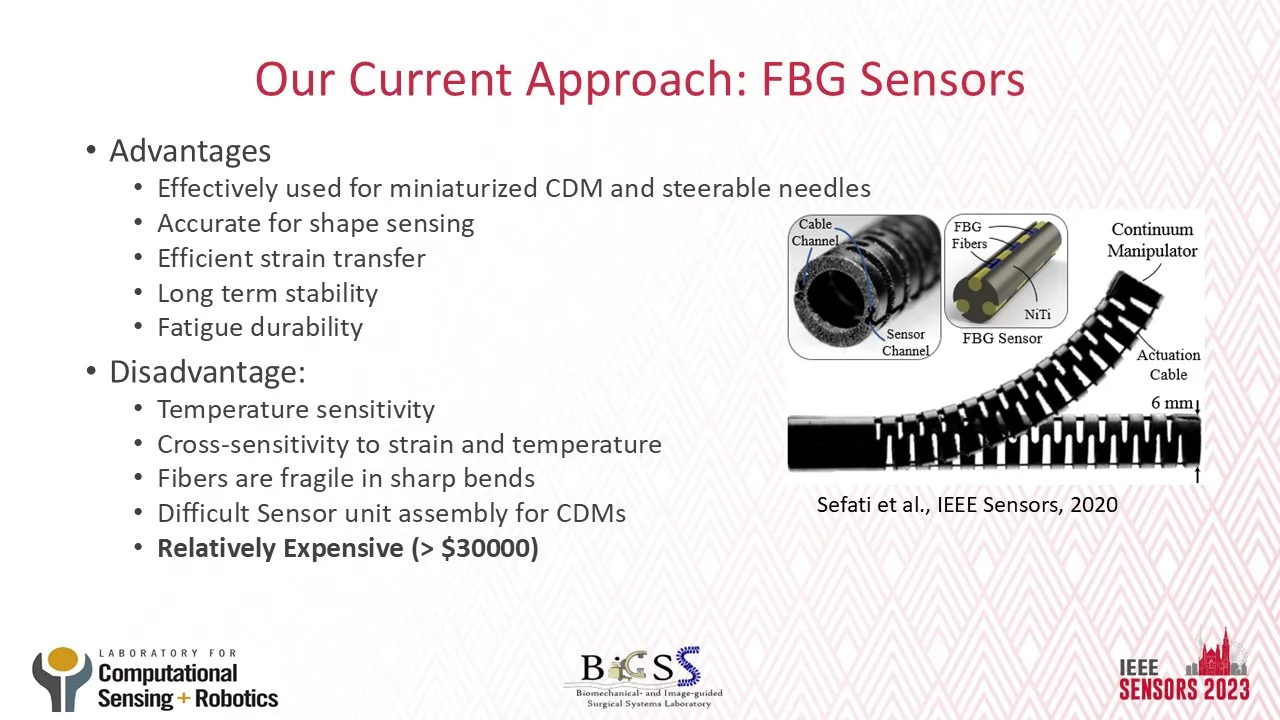
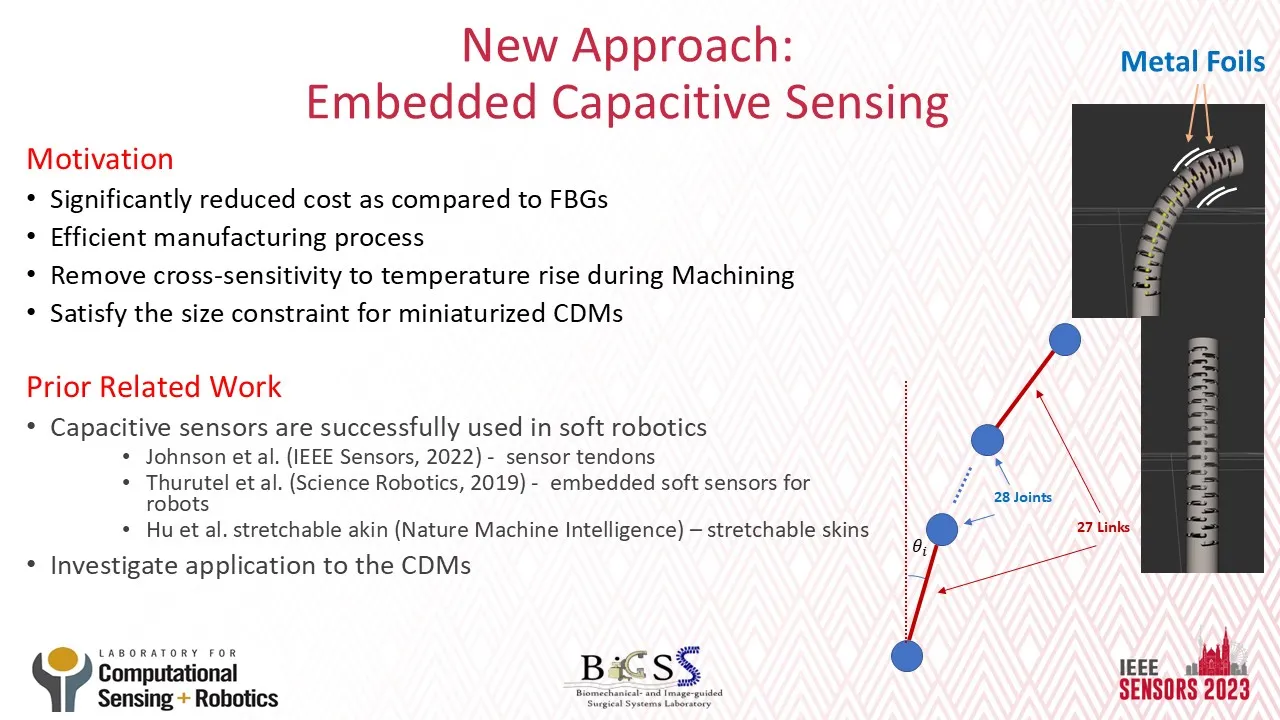
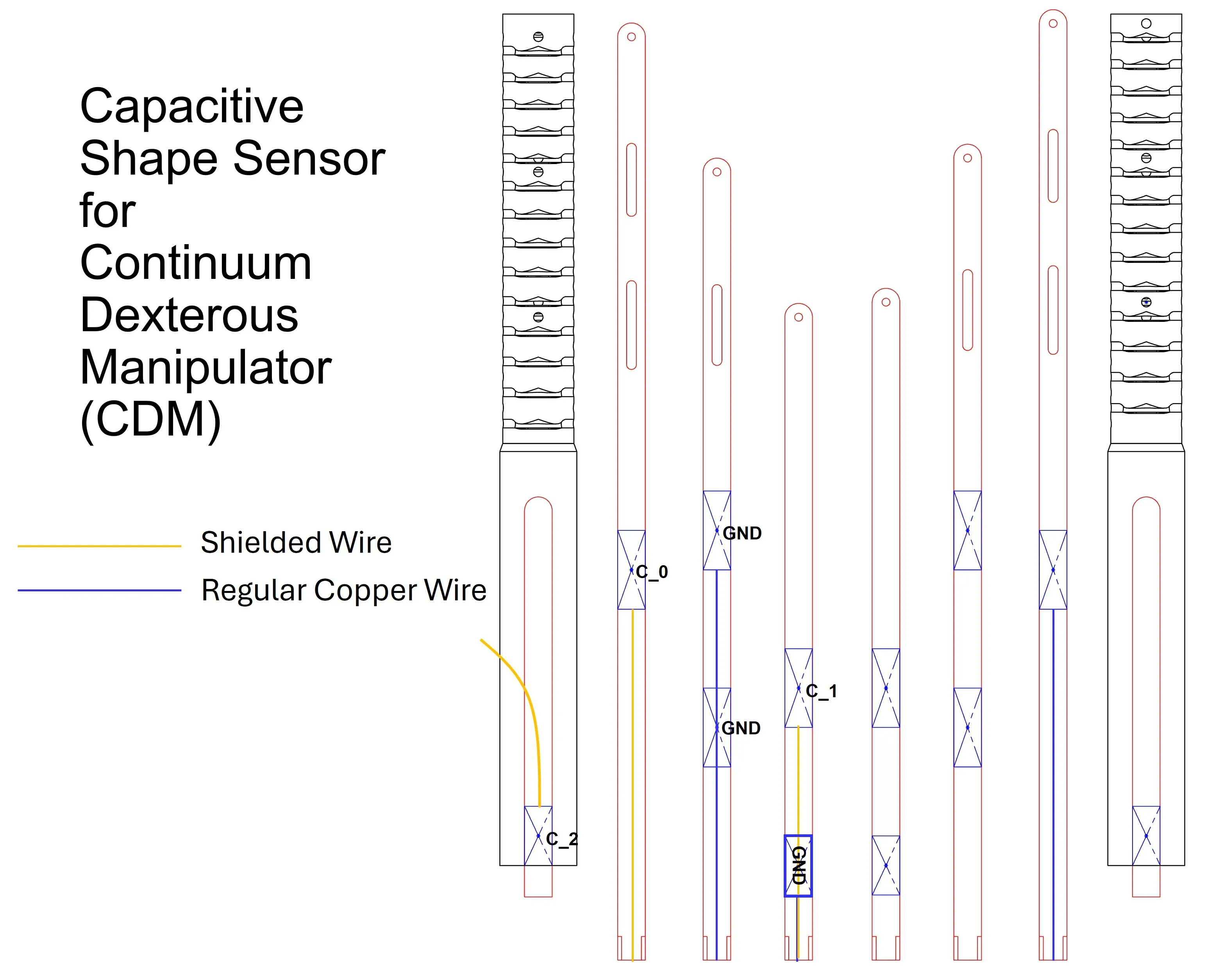
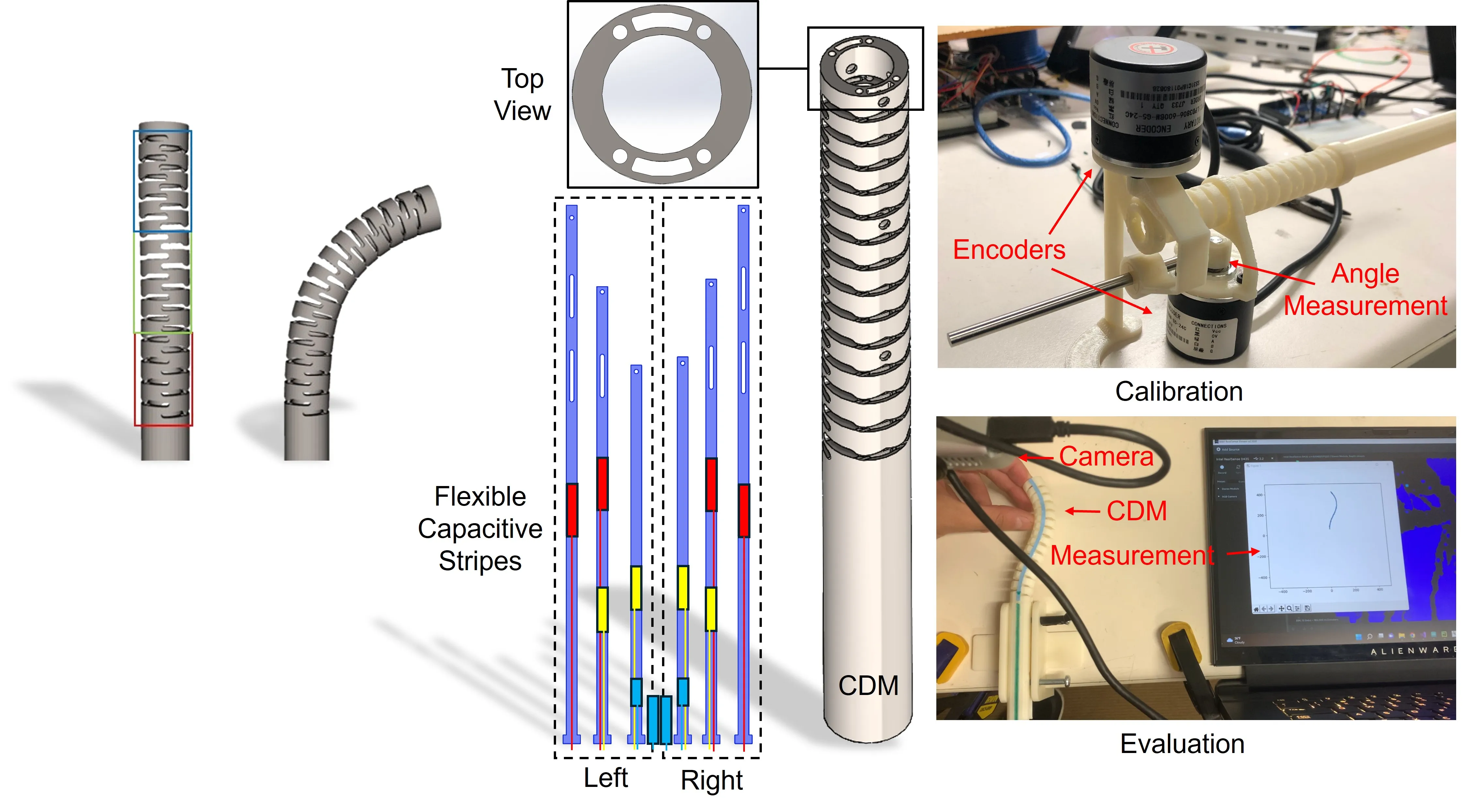
This project introduces an inexpensive embedded capacitive sensor for estimating the 3D shape of the continuum dexterous manipulators (CDMs) in real time, enabling close-loop control of the CDMs to reach desired targets and interaction with the environment. The approach combines copper-foil sensor strips embedded in the CDM wall with a vision-based pipeline and a recurrent neural network that maps raw capacitance readings to CDM shape. Experiments on a 3D-printed CDM prototype demonstrated early feasibility, significantly reducing the cost of conventional approach using fiber Bragg grating (FBG) sensors.
/ Key Contributions
- Designed and fabricated a novel embedded capacitive sensor for real-time shape estimation of continuum dexterous manipulators (CDMs) that is low-cost and easily manufacturable.
- Developed a data-driven calibration pipeline using vision-based ground truth and a recurrent neural network to map raw capacitance readings to CDM shape
- Experimentally validated the approach on a 3D-printed CDM prototype, demonstrating the potential of the capacitive sensing for future CDM applications.
Tech Stack
ROS2 Sensors Design System Intergration