
Hello, I'm
Joshua Liu
Robotics research engineer with 10+ years of experience building medical and automation systems across teleoperation, sensing, and real-time control. I specialize in ROS2, robot integration, and turning complex prototypes into reliable systems.
/ Career
A brief overview of my career
Work Experience
Robotics Research Engineer
Institute of Integrative & Innovative Research, University of Arkansas
Led development of real-time autonomous and teleoperation systems, including integrating F/T sensing, 3D camera, AR/VR, and haptics device. Built ROS2 software framework, encompassing real-time sensing, navigation, planning, and control for high-precision applications.
Research Engineer
Laboratory for Computational Sensing and Robotics, Johns Hopkins University
Implemented sensor fusion, improved system architecture, and migrated legacy code to the ROS2 framework, improving modularity and maintainability of multiple robotic systems.
Research Engineer
Hopkins Extreme Materials Institute, Johns Hopkins University
Automated and simulated the workflow for materials testing using Siemens PLC-controlled conveyor systems with multiple UR robots. Deployed the automation of the laser shock subsystem and supported the X-ray subsystem integration.
Postdoctoral Research Fellow
Laboratory of Biomechanical and Image Guided Surgical Systems, Johns Hopkins University
Developed robotic systems for spinal/hip surgery and designed capacitive shape sensors for dexterous continuum manipulators. Supported the medical imaging workflow for both image-guided orthopedic surgery and the development of a total-body photography system for skin lesion detection.
Robotics Summer Intern
BMW Group
Contributed to ROS framework development for a self-driving car research platform and created an RViz visualization plugin for laser radar sensors.
Robotics Research Engineer
Institute of Integrative & Innovative Research, University of Arkansas
Led development of real-time autonomous and teleoperation systems, including integrating F/T sensing, 3D camera, AR/VR, and haptics device. Built ROS2 software framework, encompassing real-time sensing, navigation, planning, and control for high-precision applications.
Research Engineer
Laboratory for Computational Sensing and Robotics, Johns Hopkins University
Implemented sensor fusion, improved system architecture, and migrated legacy code to the ROS2 framework, improving modularity and maintainability of multiple robotic systems.
Research Engineer
Hopkins Extreme Materials Institute, Johns Hopkins University
Automated and simulated the workflow for materials testing using Siemens PLC-controlled conveyor systems with multiple UR robots. Deployed the automation of the laser shock subsystem and supported the X-ray subsystem integration.
Postdoctoral Research Fellow
Laboratory of Biomechanical and Image Guided Surgical Systems, Johns Hopkins University
Developed robotic systems for spinal/hip surgery and designed capacitive shape sensors for dexterous continuum manipulators. Supported the medical imaging workflow for both image-guided orthopedic surgery and the development of a total-body photography system for skin lesion detection.
Robotics Summer Intern
BMW Group
Contributed to ROS framework development for a self-driving car research platform and created an RViz visualization plugin for laser radar sensors.
Education
Ph.D. in Mechanical Engineering
Johns Hopkins University
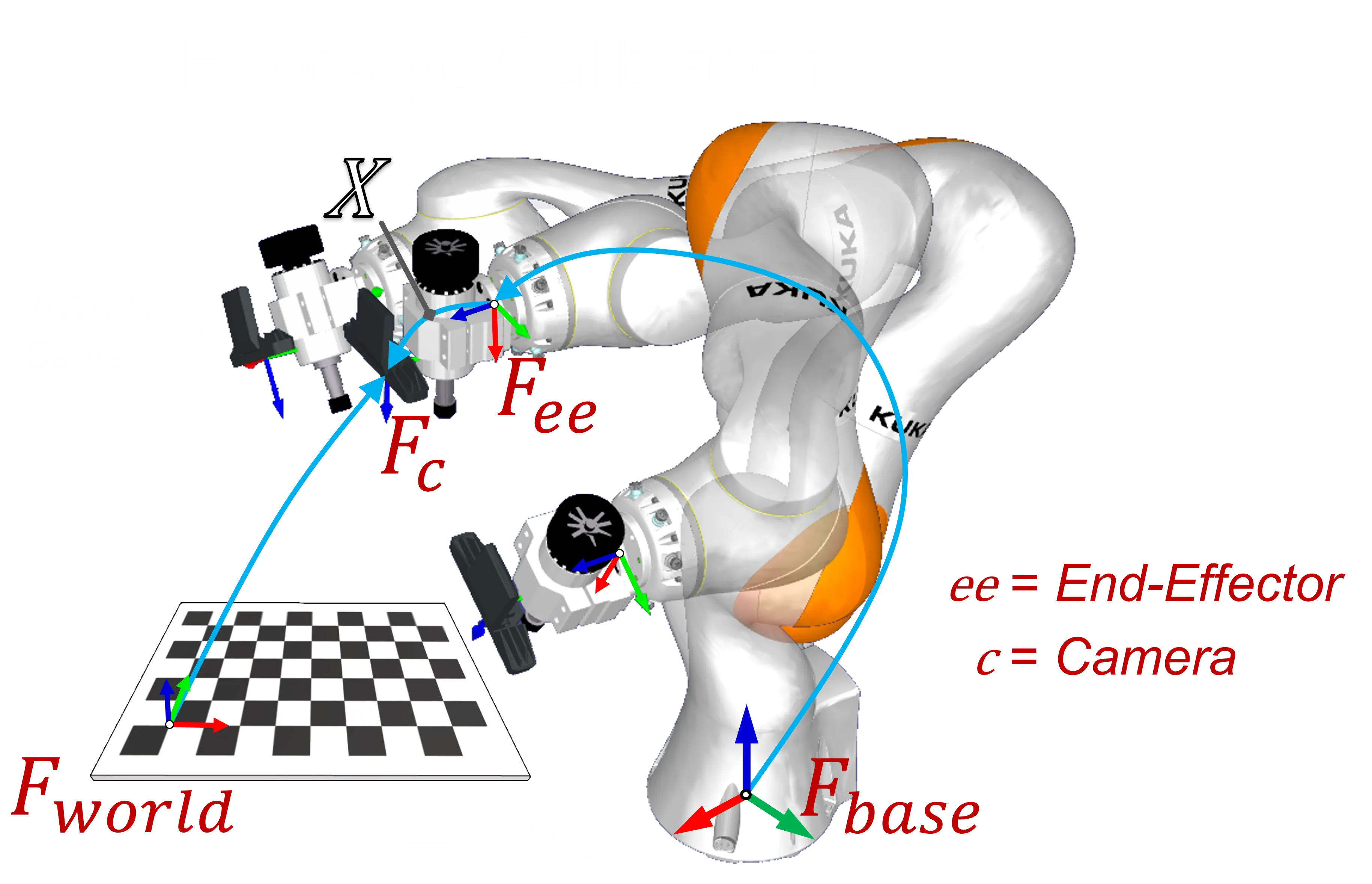
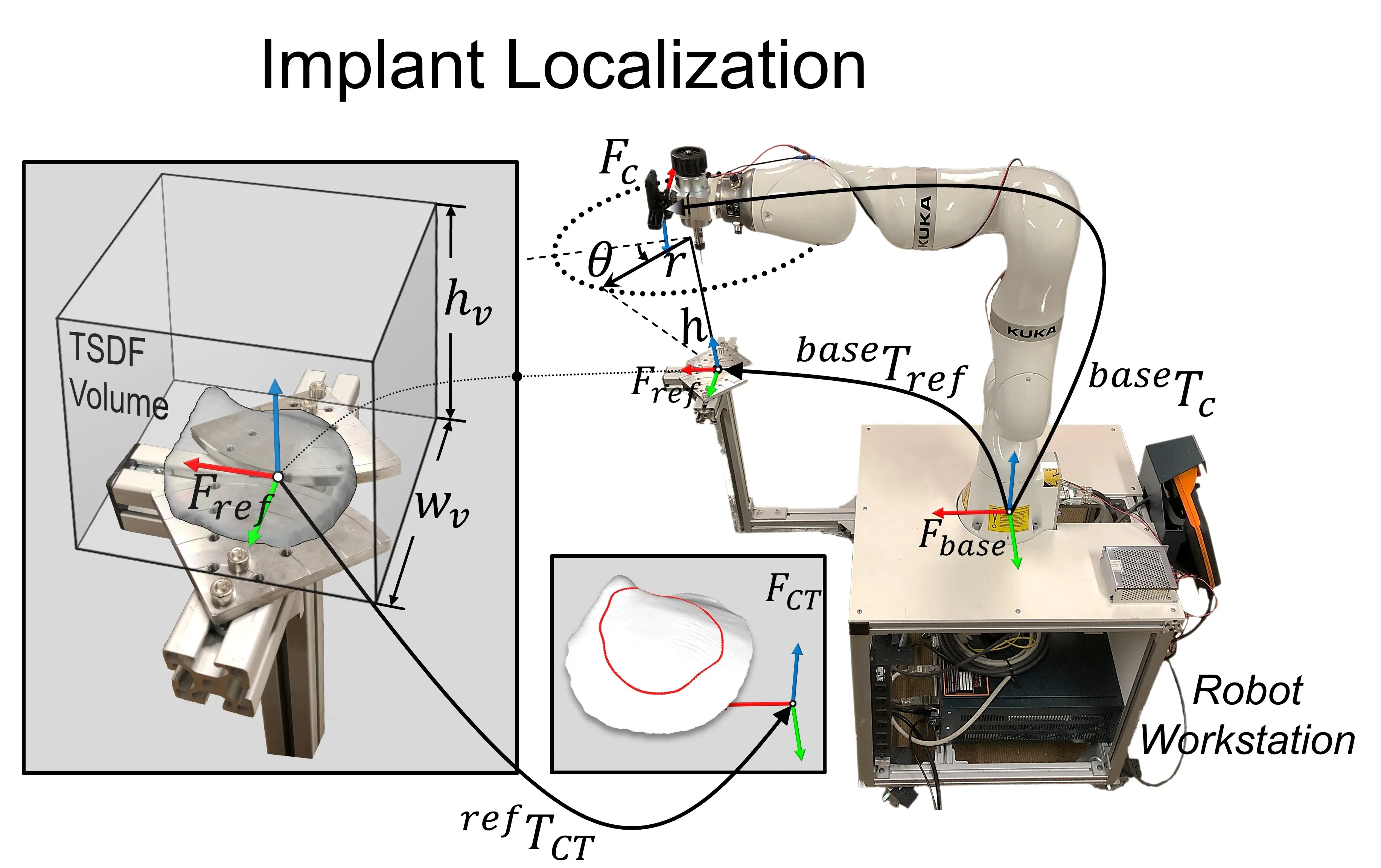
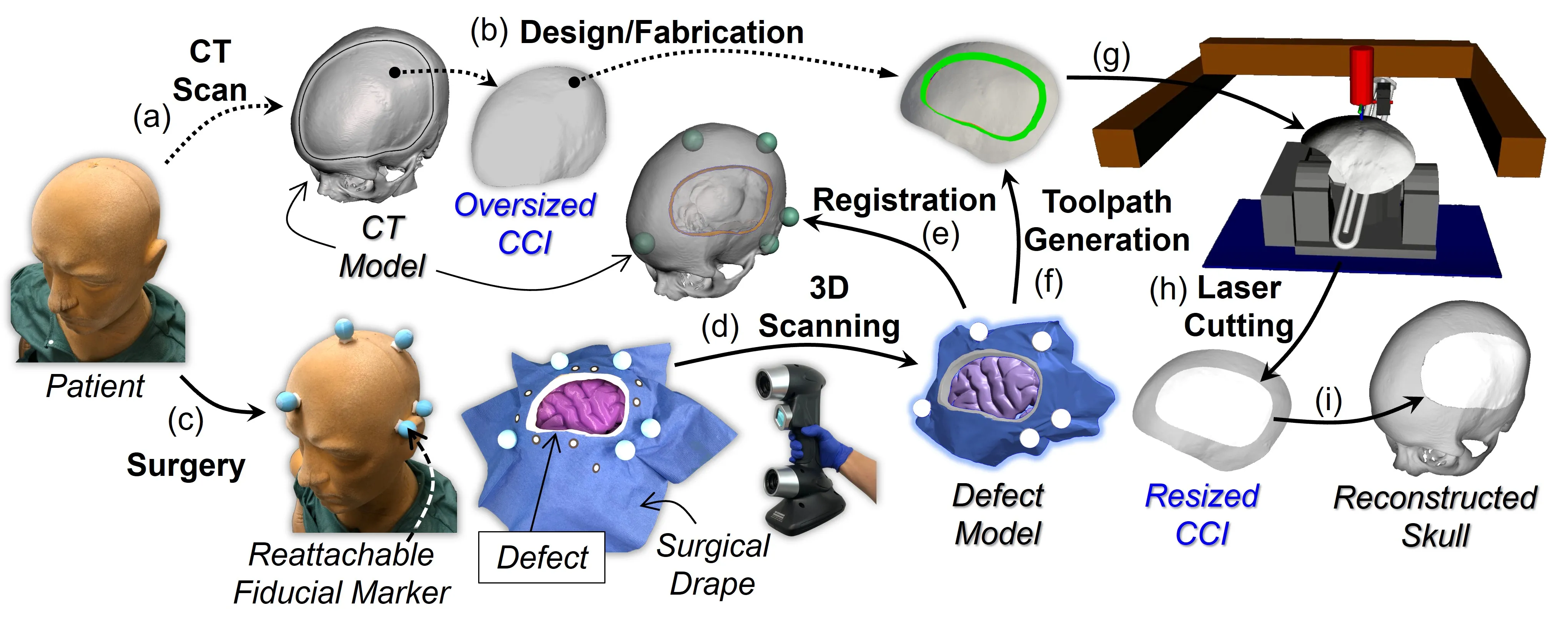
Advisor: Dr. Mehran Armand Designed and implemented robotic systems for neuroplastic surgery implant modification, including a 5-axis laser cutting system with full-stack development (mechanical design, ROS2 control, registration, toolpath optimization). Built a miniature optical tracking & projection mapping system using RGB-D camera. Developed an automated pipeline using designed reattachable fiducial markers for intraoperative patient-CT registration and implant modification.
Dissertation: Robotic Implant Modification for Neuroplastic SurgeryM.S.E. in Mechanical Engineering
Johns Hopkins University
Graduate studies focused on Robotics and Control Systems.
B.S. in Mechanical Engineering
Changsha University of Science and Technology
Undergraduate foundation in Mechanical Design and Mechatronics.
Ph.D. in Mechanical Engineering
Johns Hopkins University
Advisor: Dr. Mehran Armand Designed and implemented robotic systems for neuroplastic surgery implant modification, including a 5-axis laser cutting system with full-stack development (mechanical design, ROS2 control, registration, toolpath optimization). Built a miniature optical tracking & projection mapping system using RGB-D camera. Developed an automated pipeline using designed reattachable fiducial markers for intraoperative patient-CT registration and implant modification.
Dissertation: Robotic Implant Modification for Neuroplastic SurgeryM.S.E. in Mechanical Engineering
Johns Hopkins University
Graduate studies focused on Robotics and Control Systems.
B.S. in Mechanical Engineering
Changsha University of Science and Technology
Undergraduate foundation in Mechanical Design and Mechatronics.
/ Featured Projects
A selection of my projects, prototypes, and developed systems.
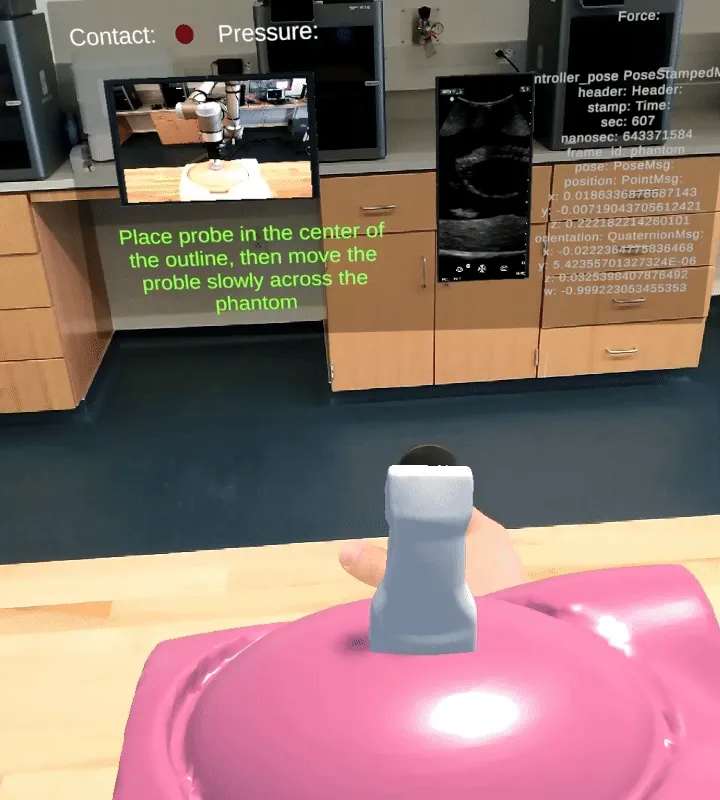
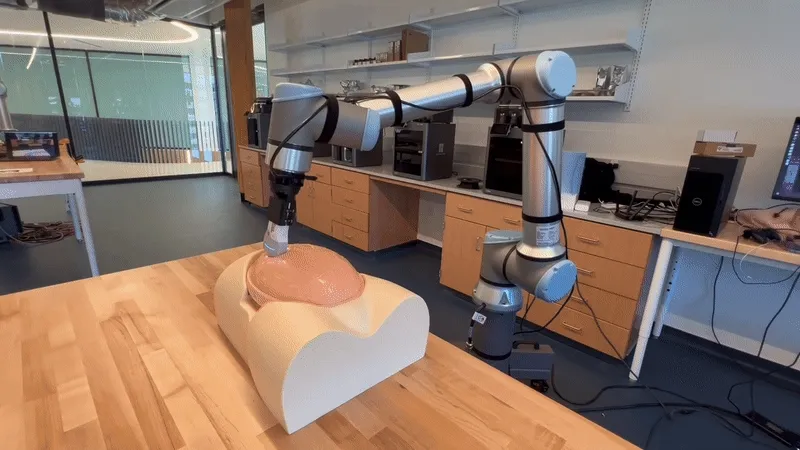
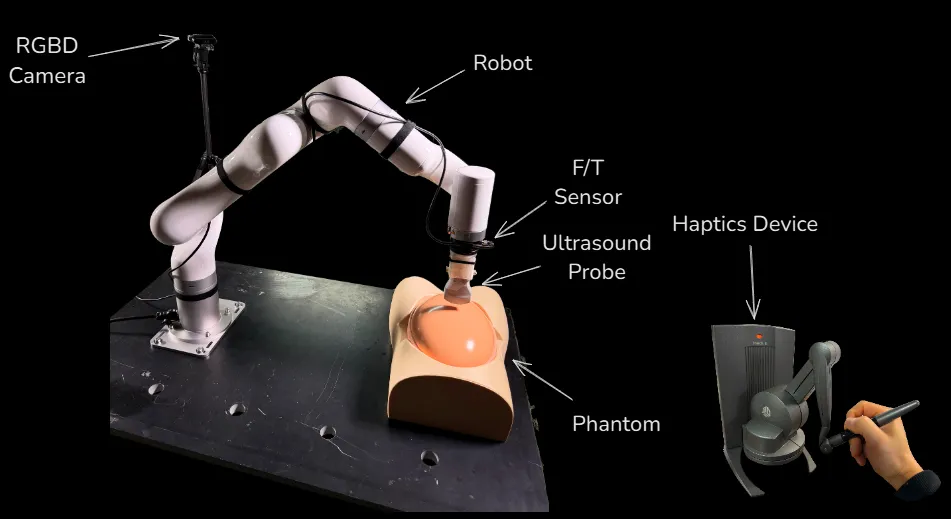
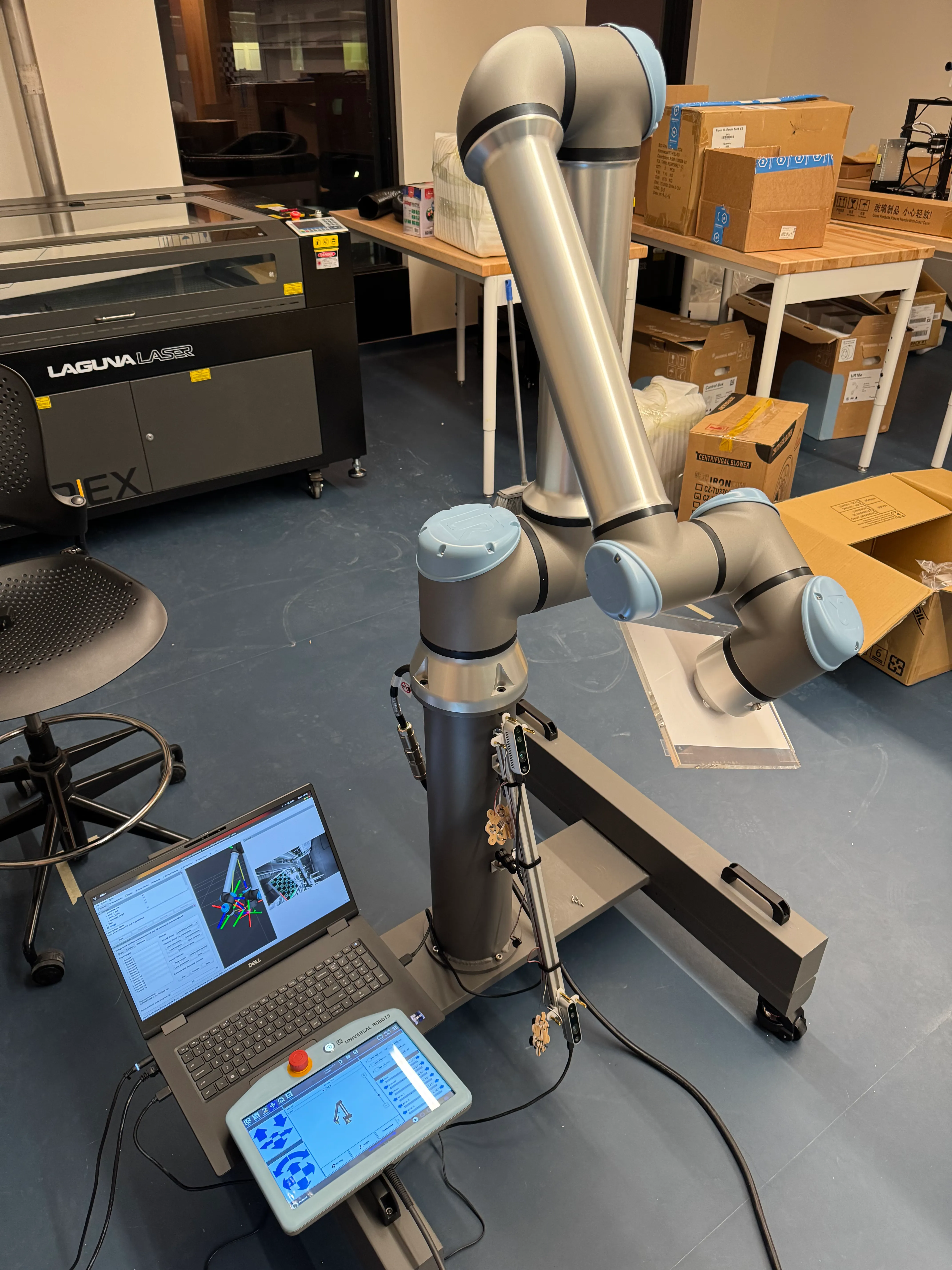
Robotic Teleoperation for Ultrasound Scanning
July 2025 - Present
Built a real-time remote teleoperation system with haptic feedback for robot-assisted ultrasound scanning.
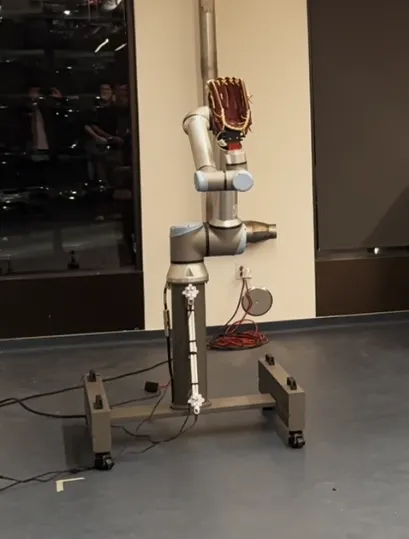
Robot Catcher
Oct 2024 - April 2025
Developed a UR robot system capable of catching a flying baseball in real time.
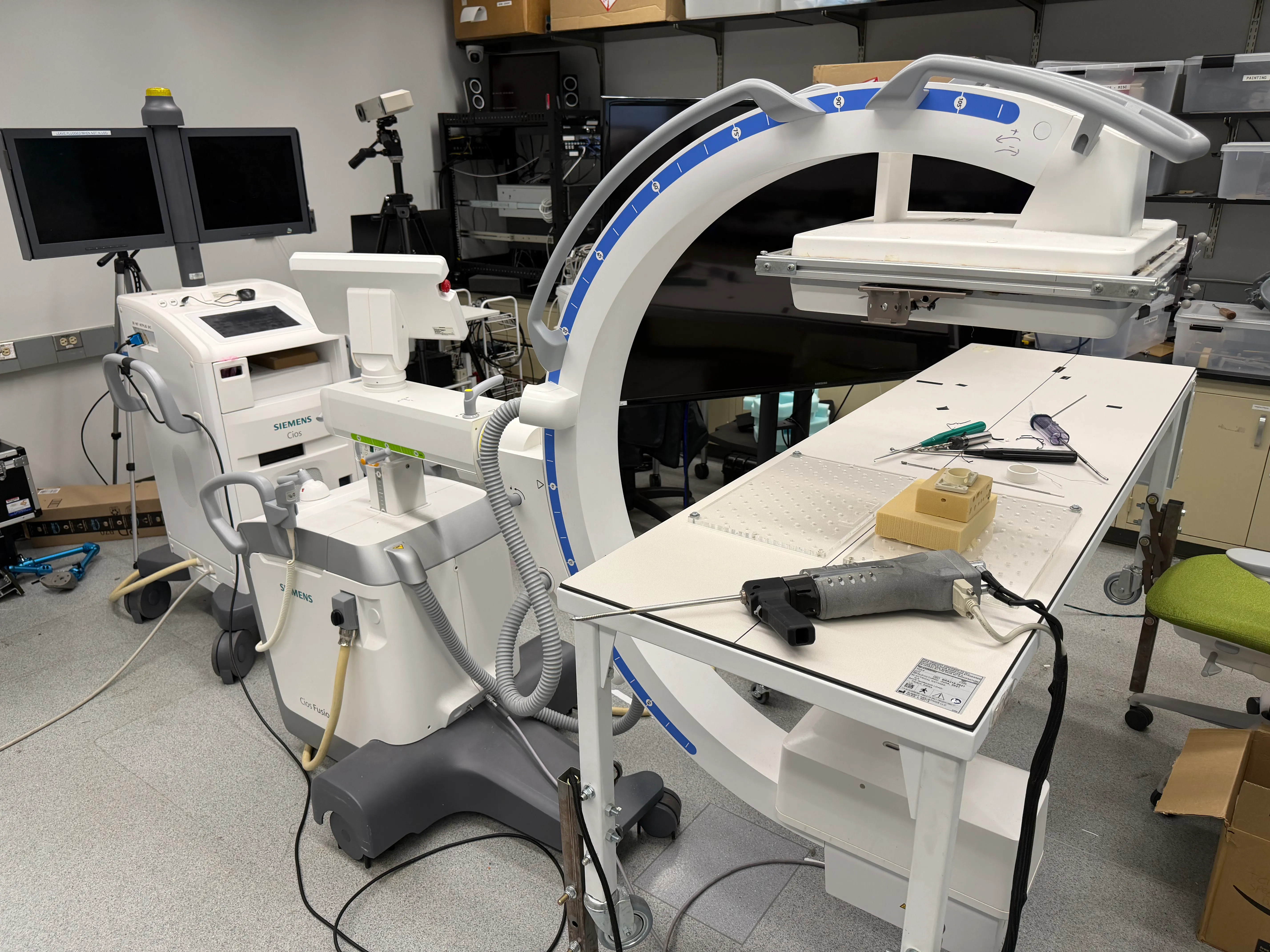
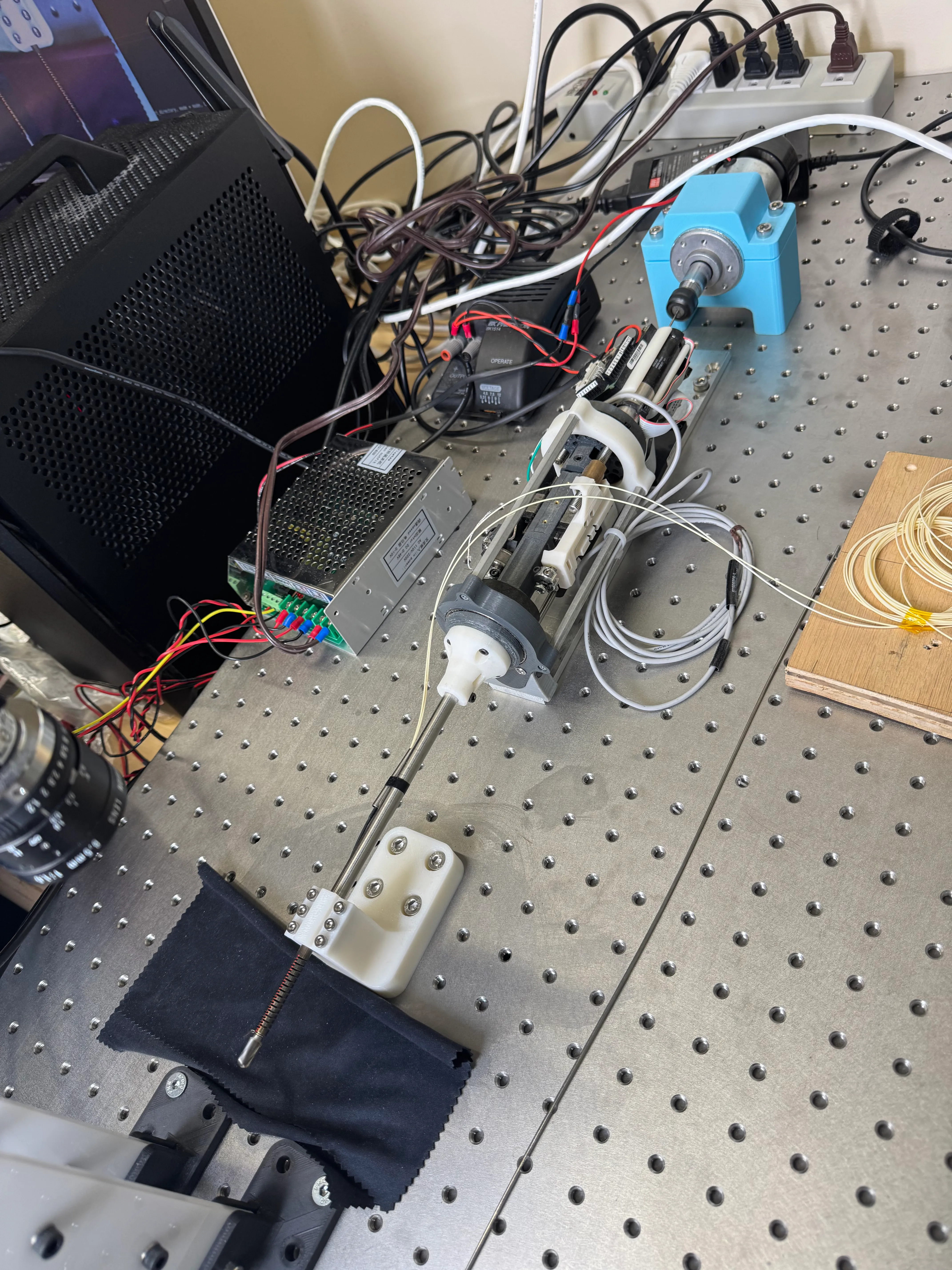
Image-Guided Robotic Orthopedic Surgery
Aug 2022 - Oct 2024
Integrating an image-guided CDM actuation robotic system for robot-assisted orthopedic surgery.
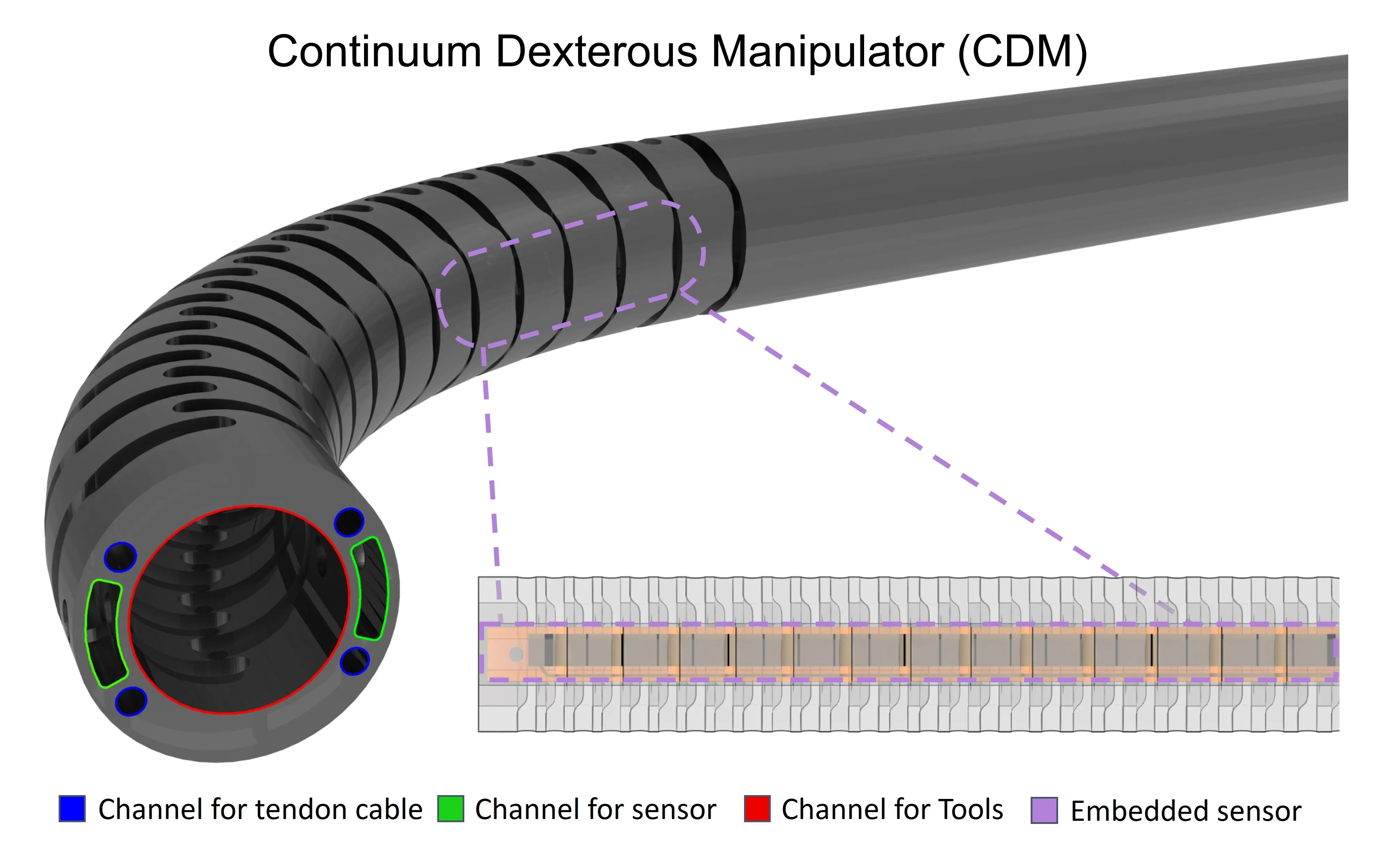
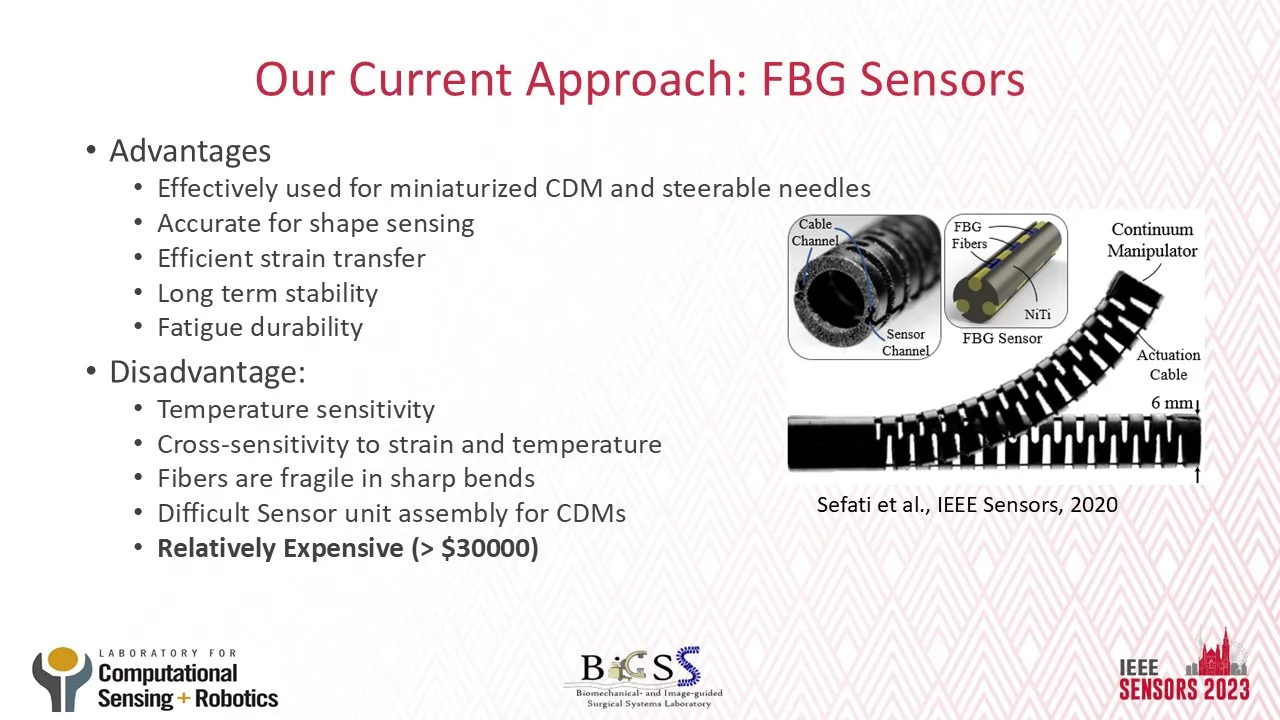
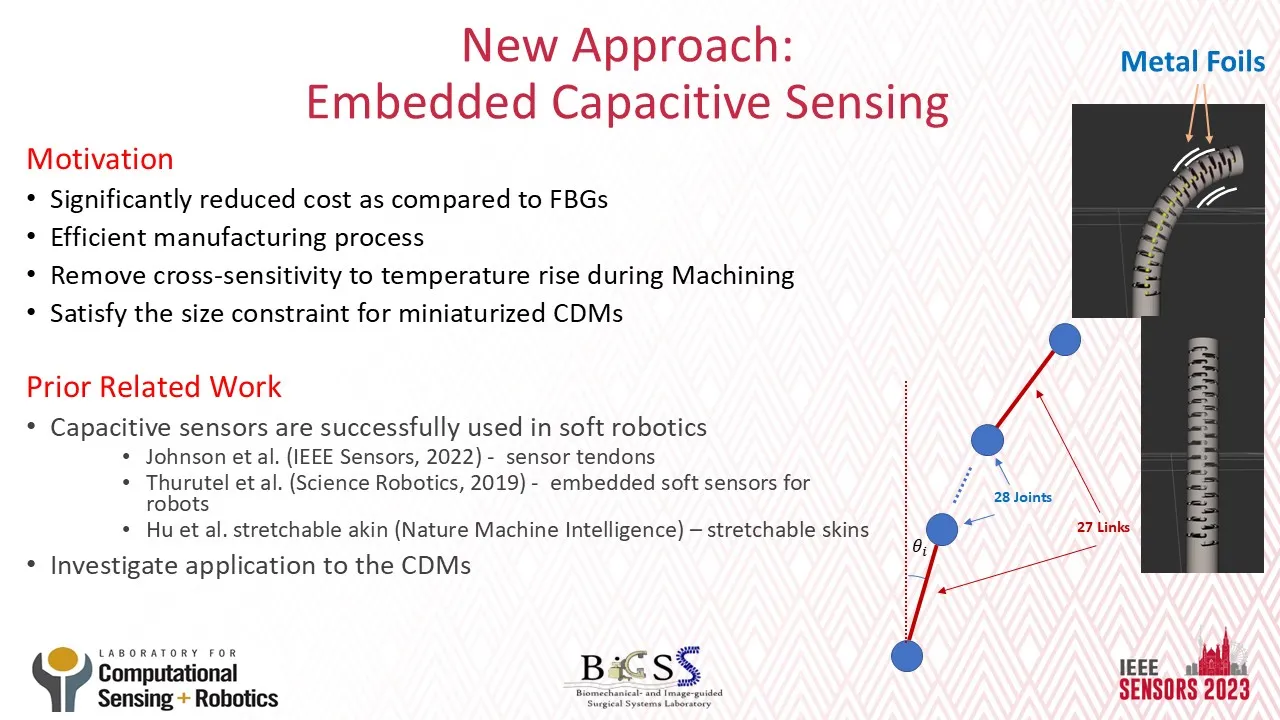
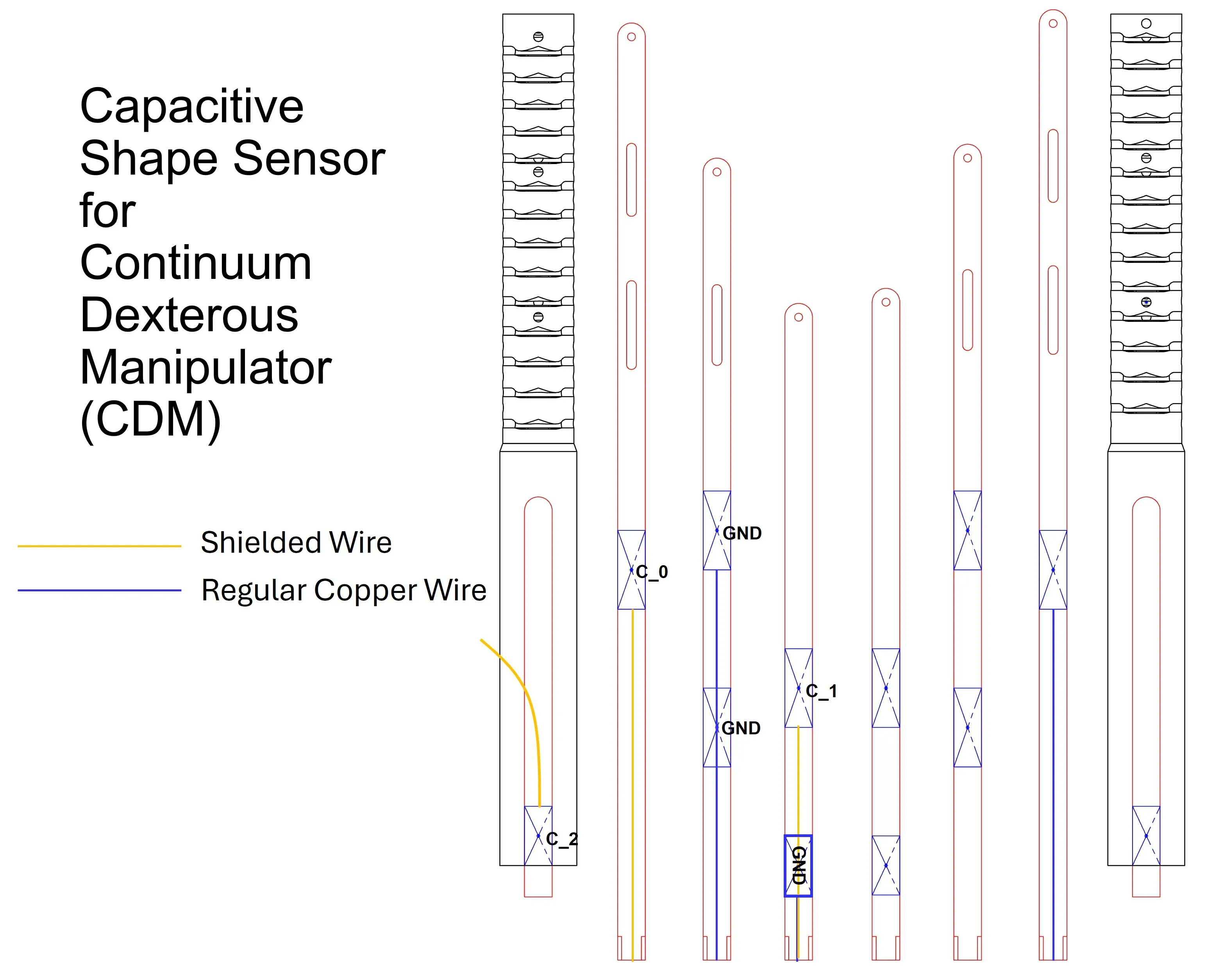
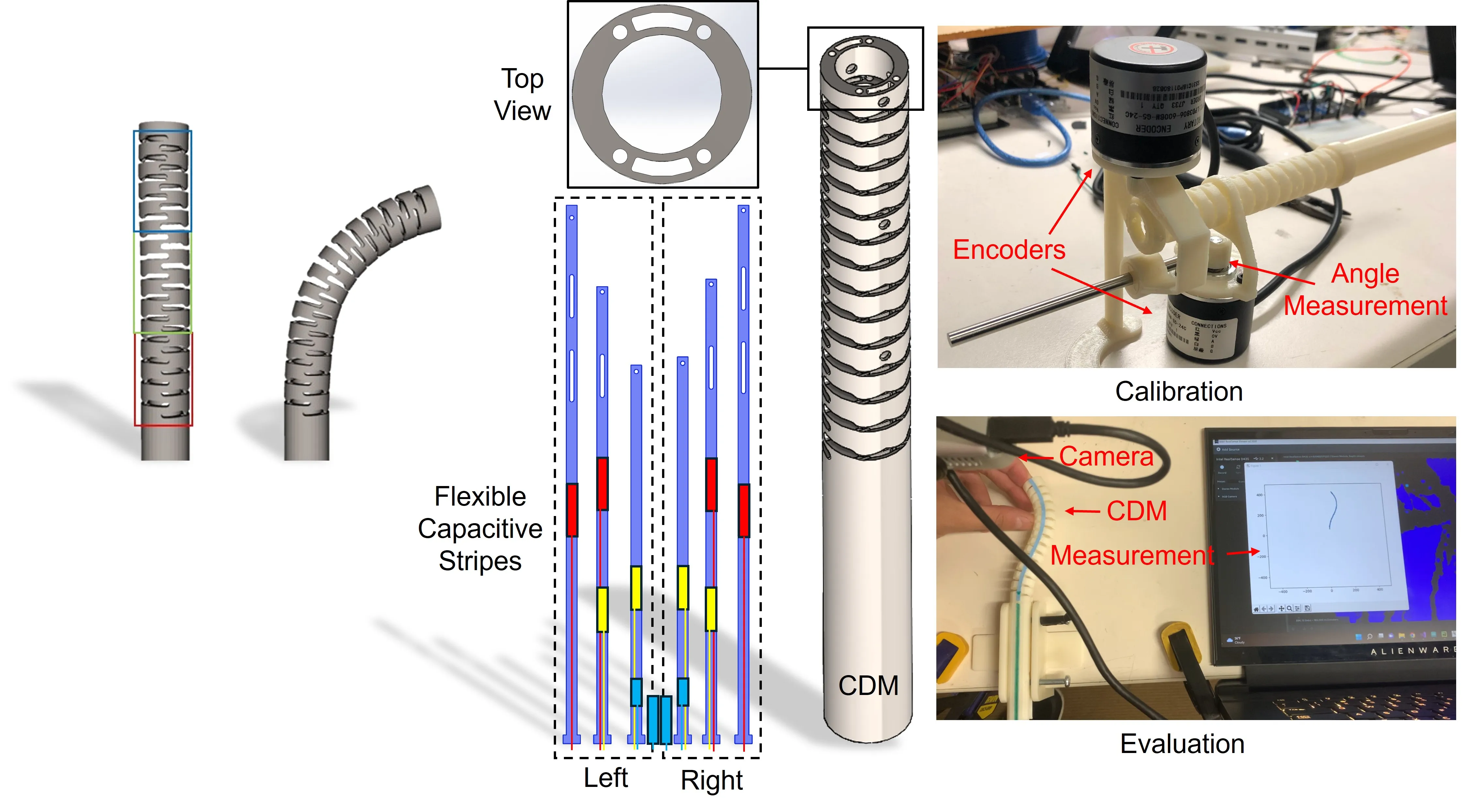
Embedded Capacitive Sensing for Continuum Dexterous Manipulators
Oct 2021 - Aug 2022
Developed a capacitive shape sensor for real-time shape estimation of continuum dexterous manipulators (CDMs).
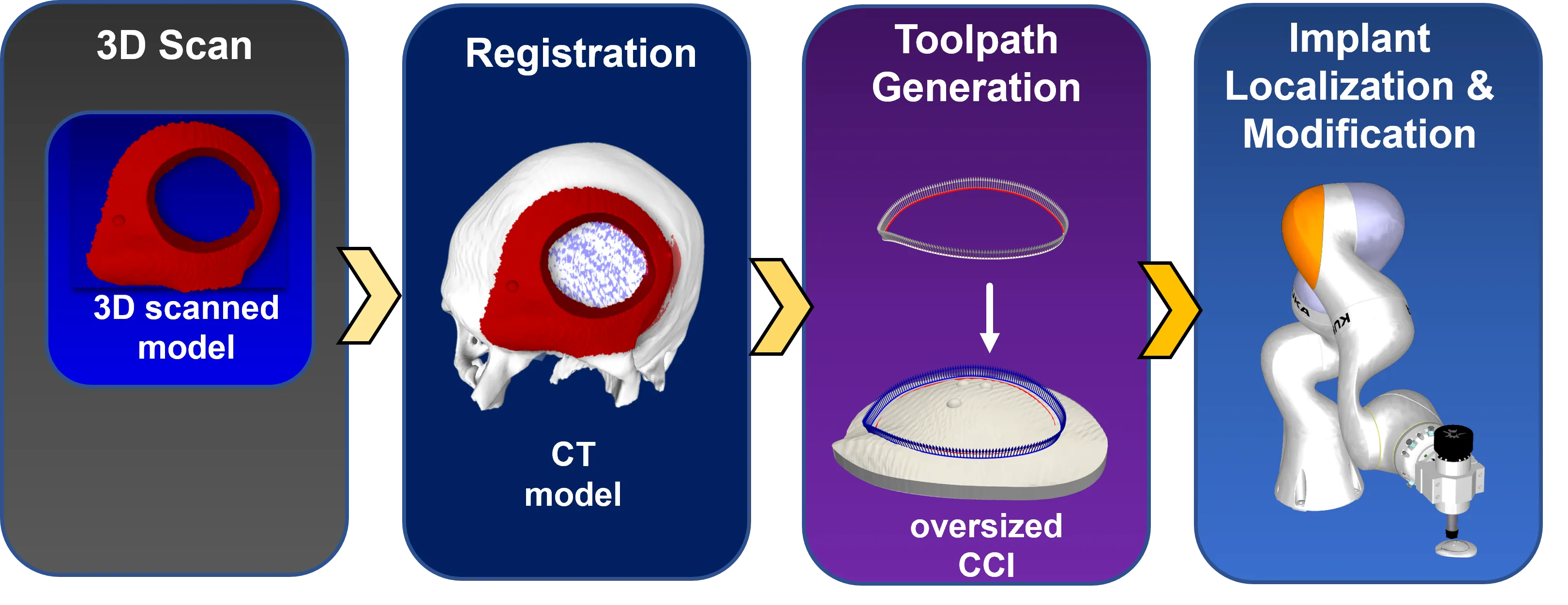
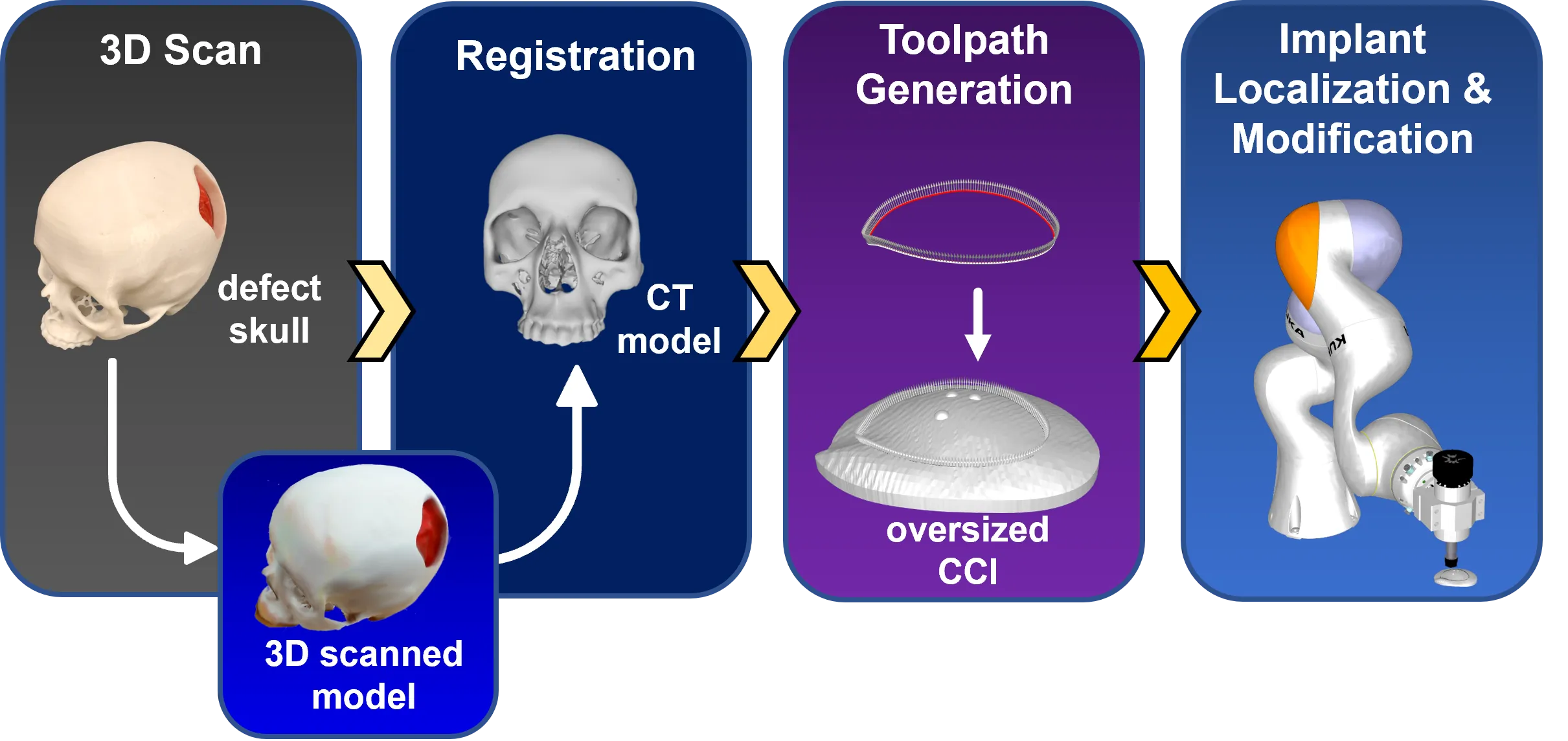
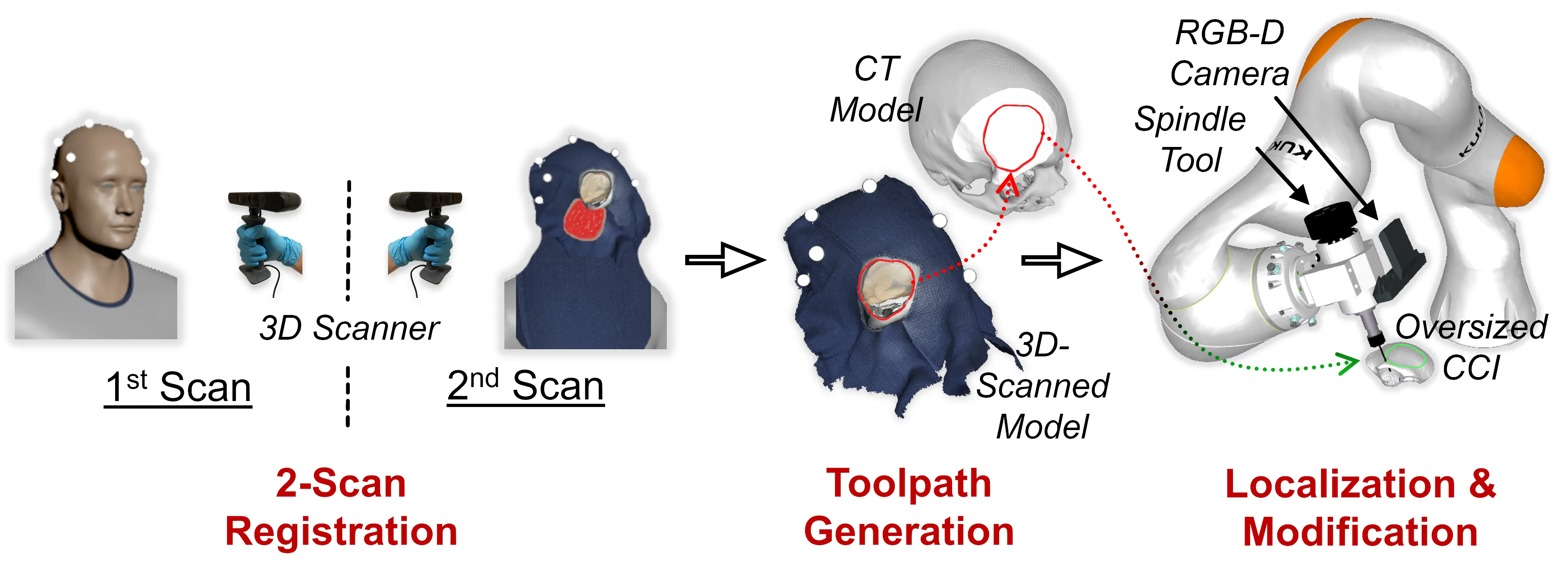
Automated Implant Modification in Neuroplastic Surgery
2020 Fall - 2021 Spring
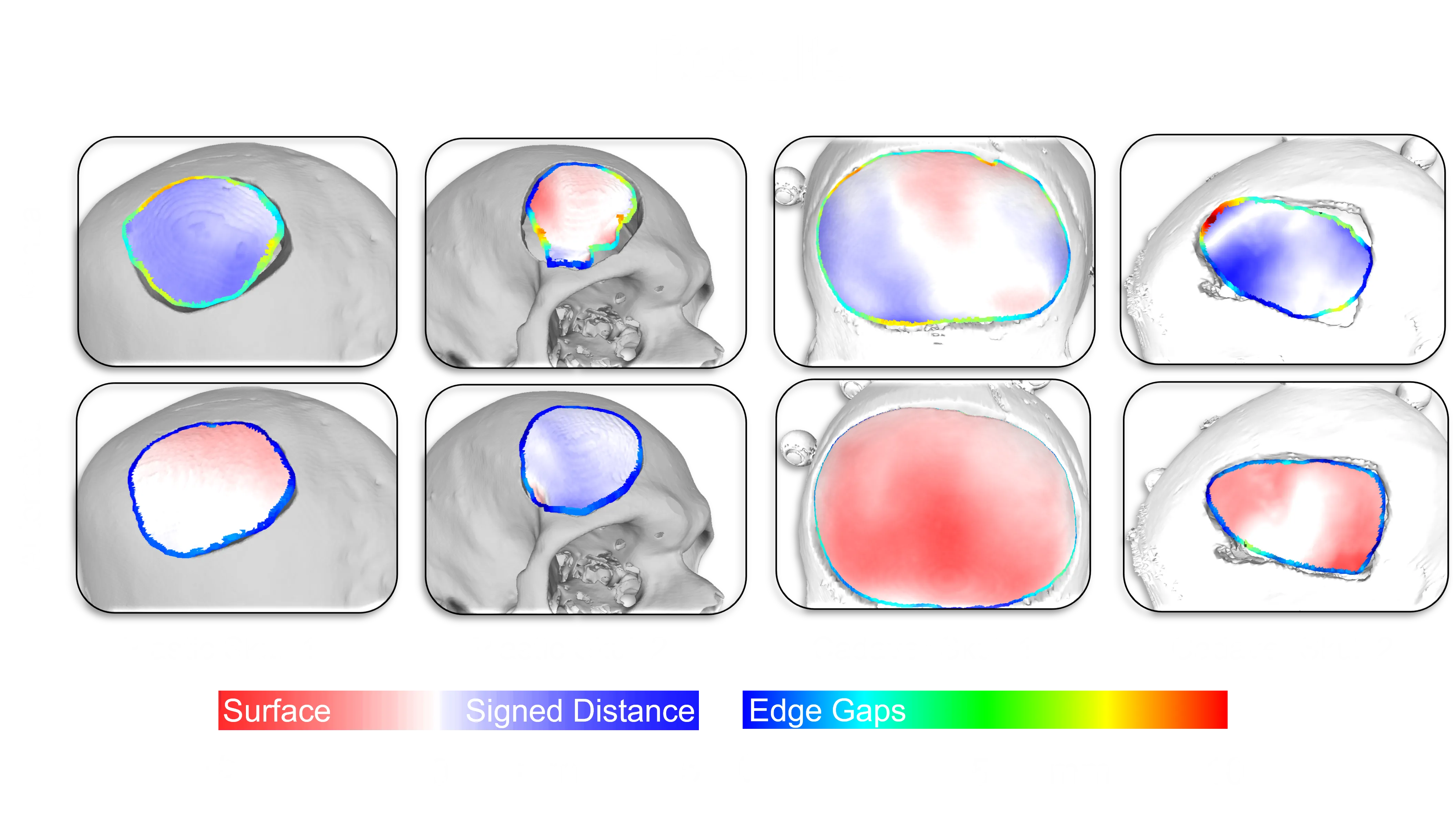
Proposed a novel approach for automated modification of patient-specific cranial implants during neuroplastic surgery.
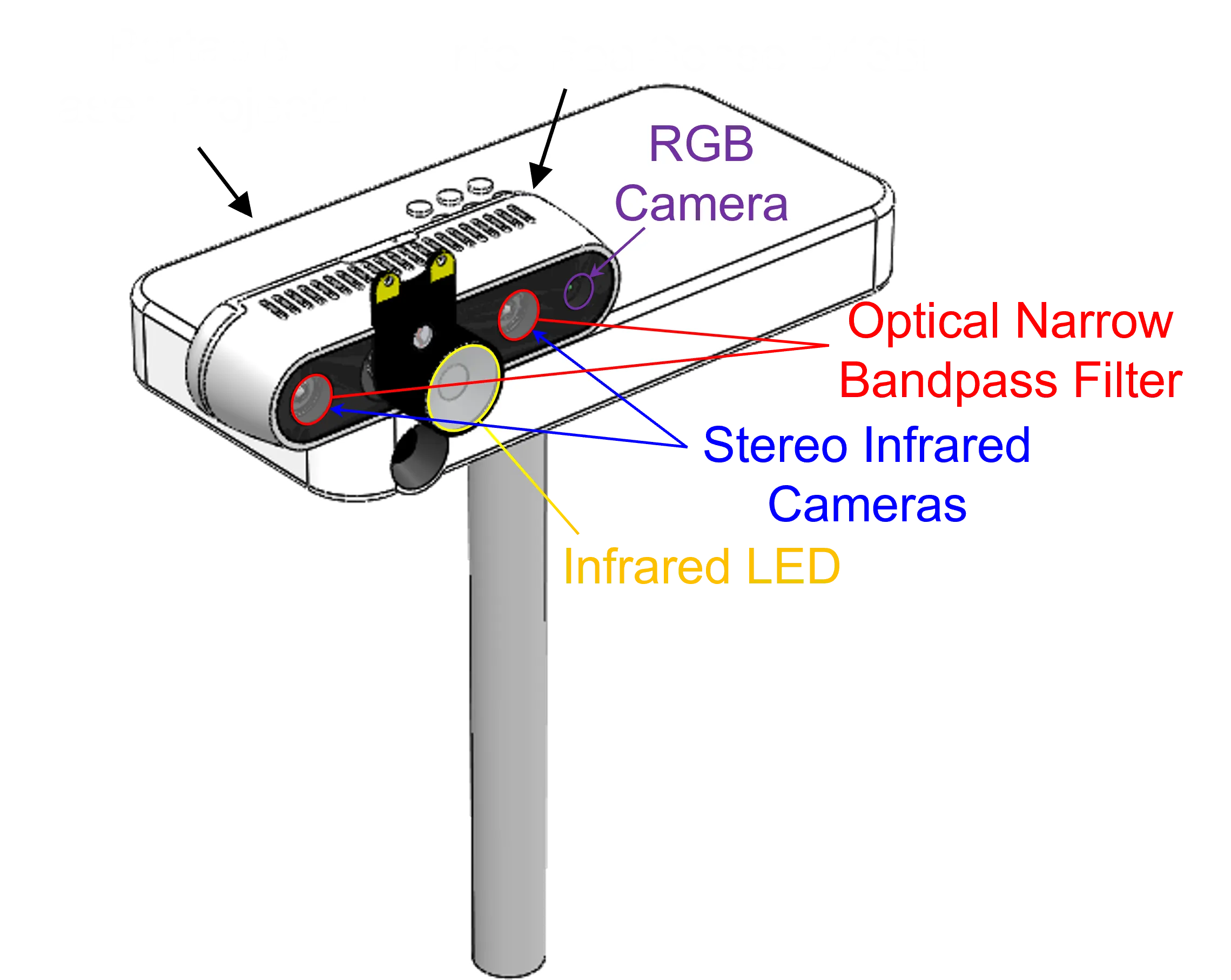
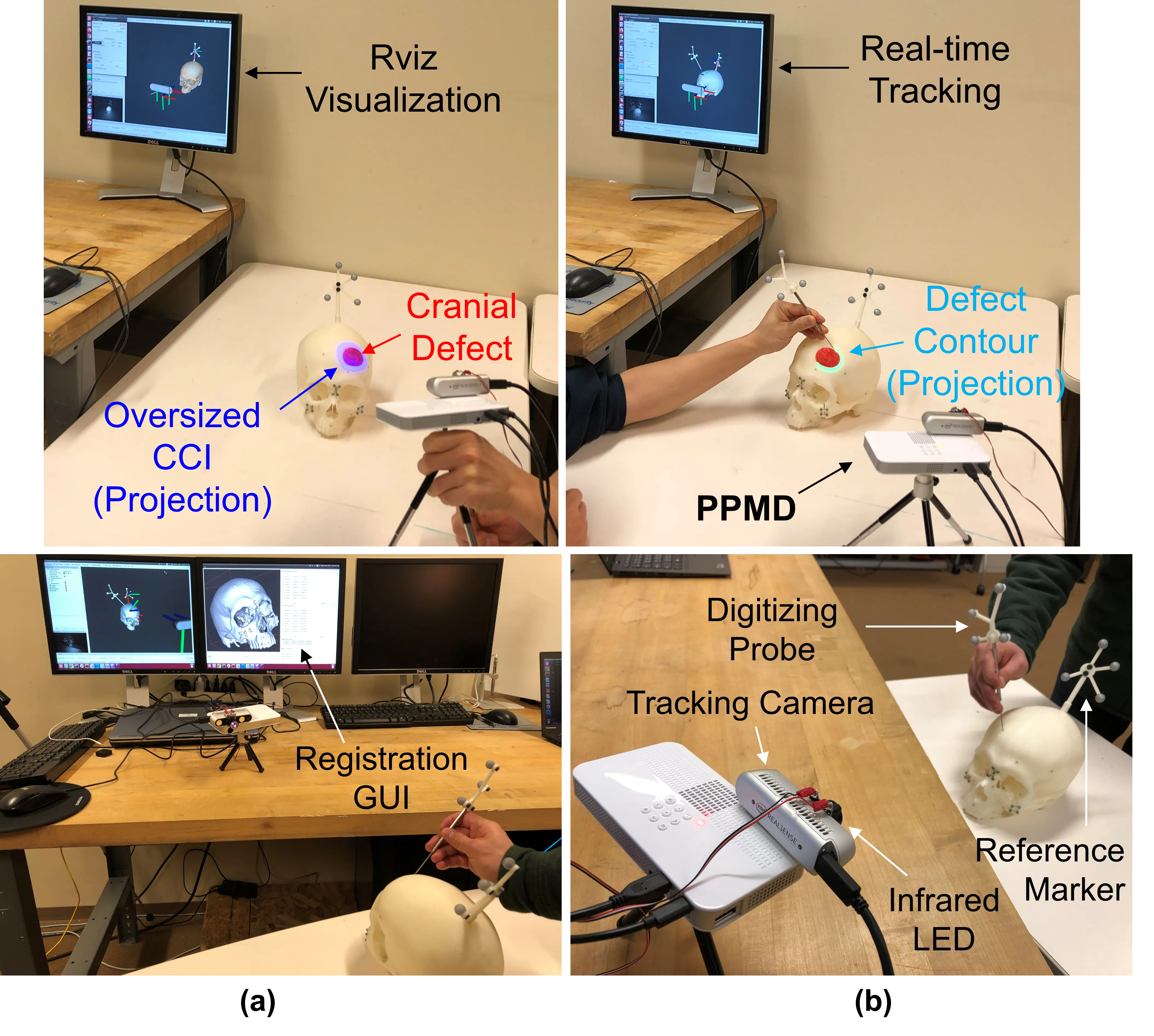
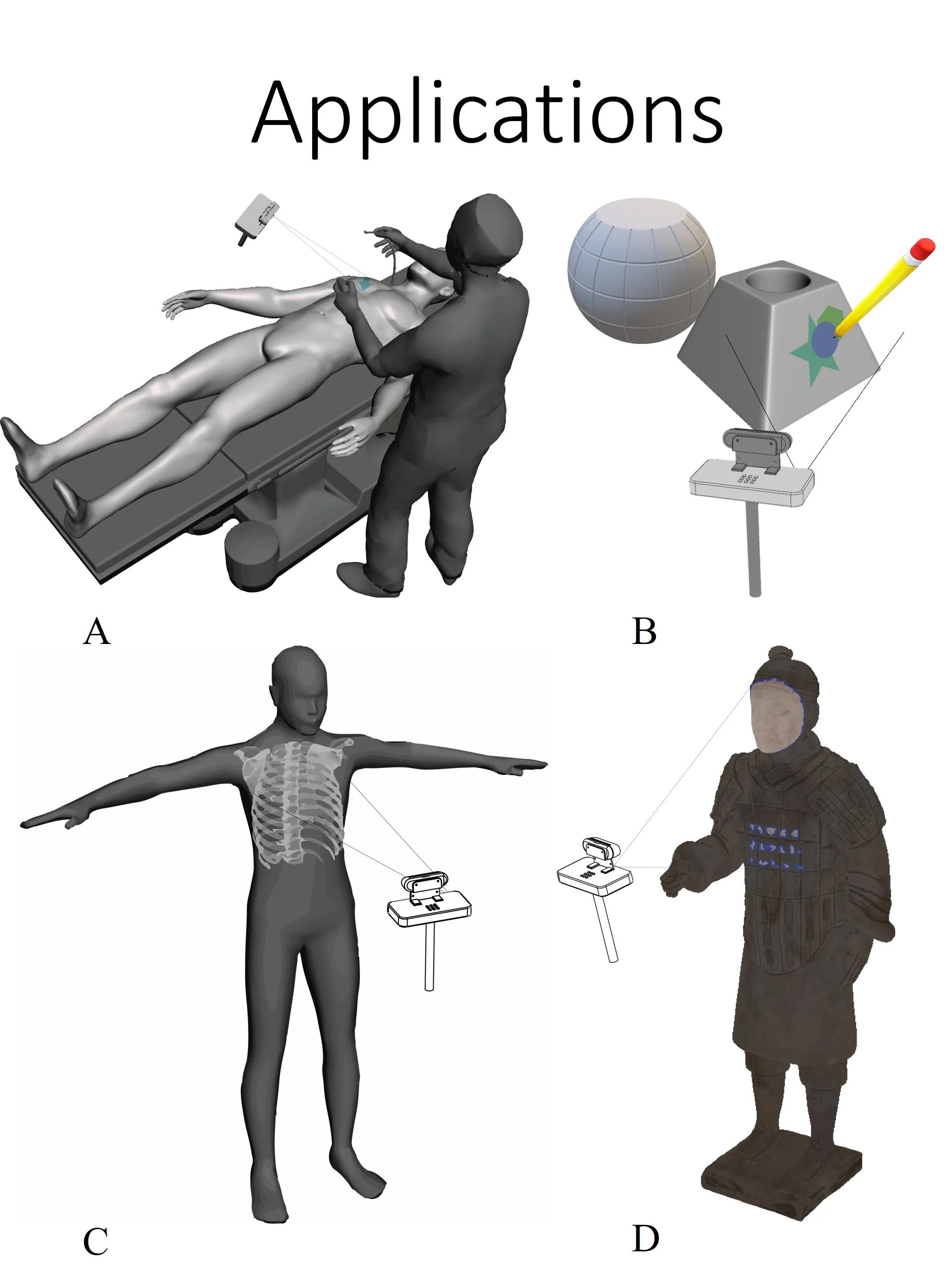
Portable Projection Mapping Device (PPMD)
2019 Fall - 2020 Spring
A portable projection mapping device for projection-based medical augmented reality applications.
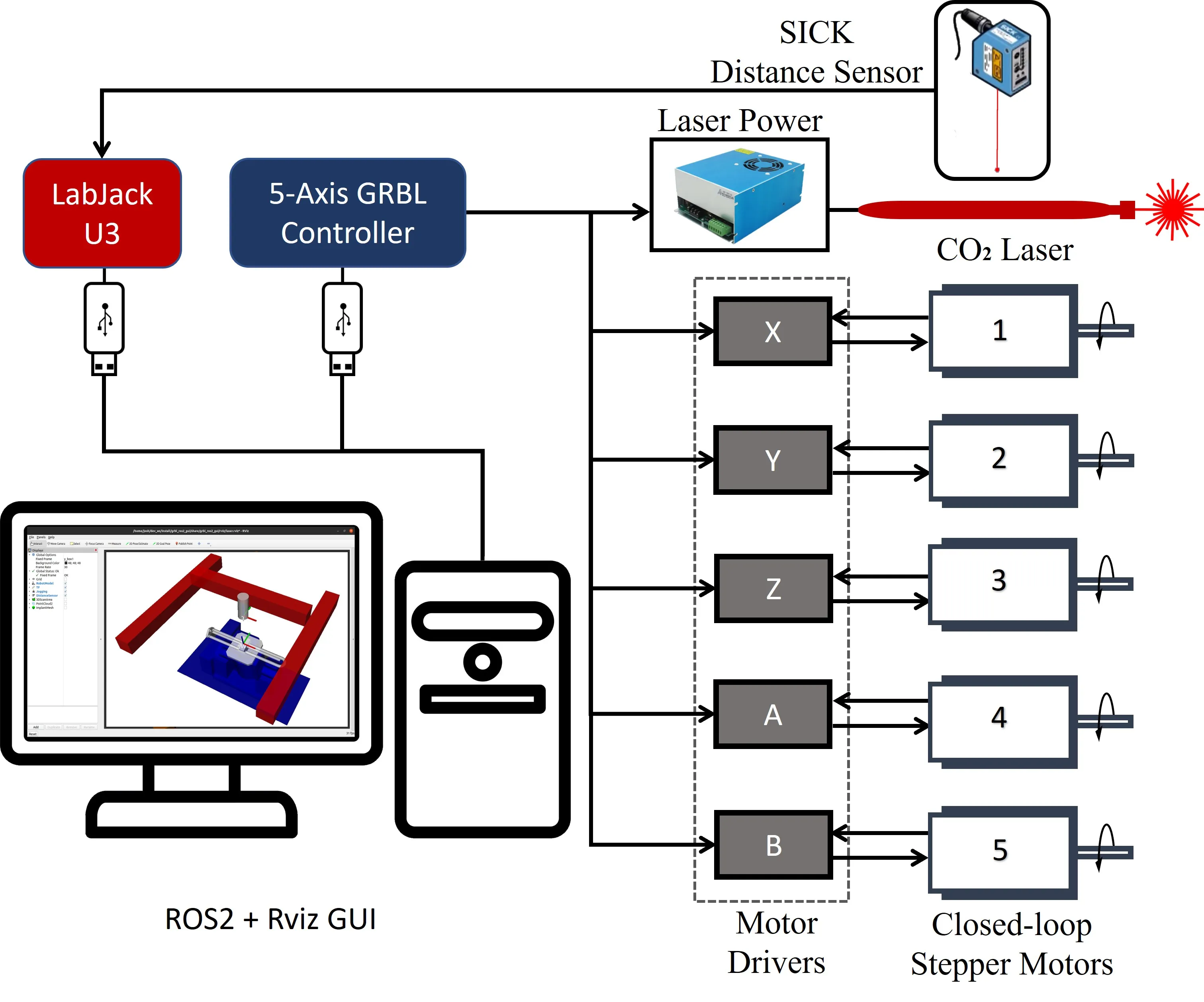
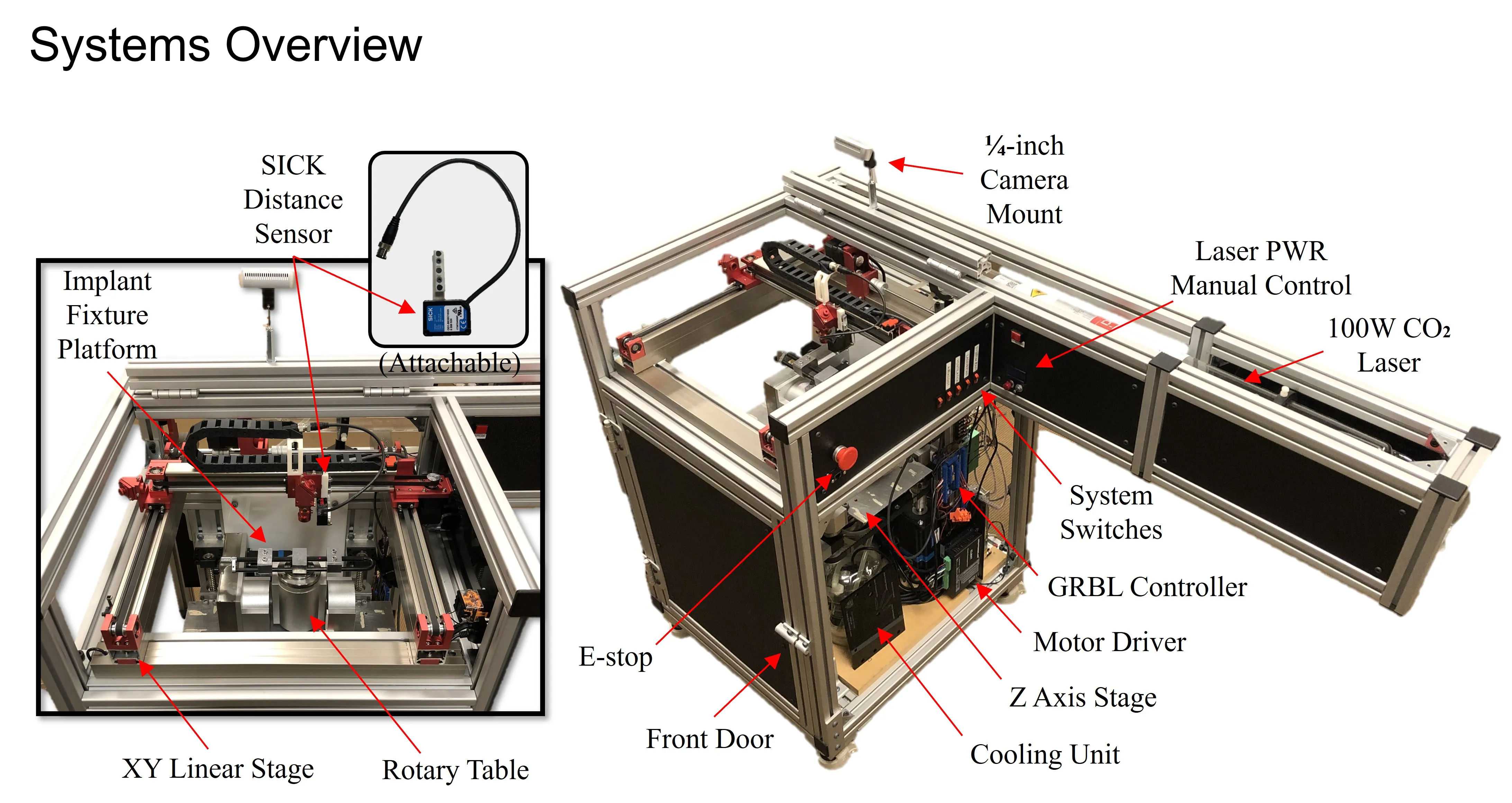
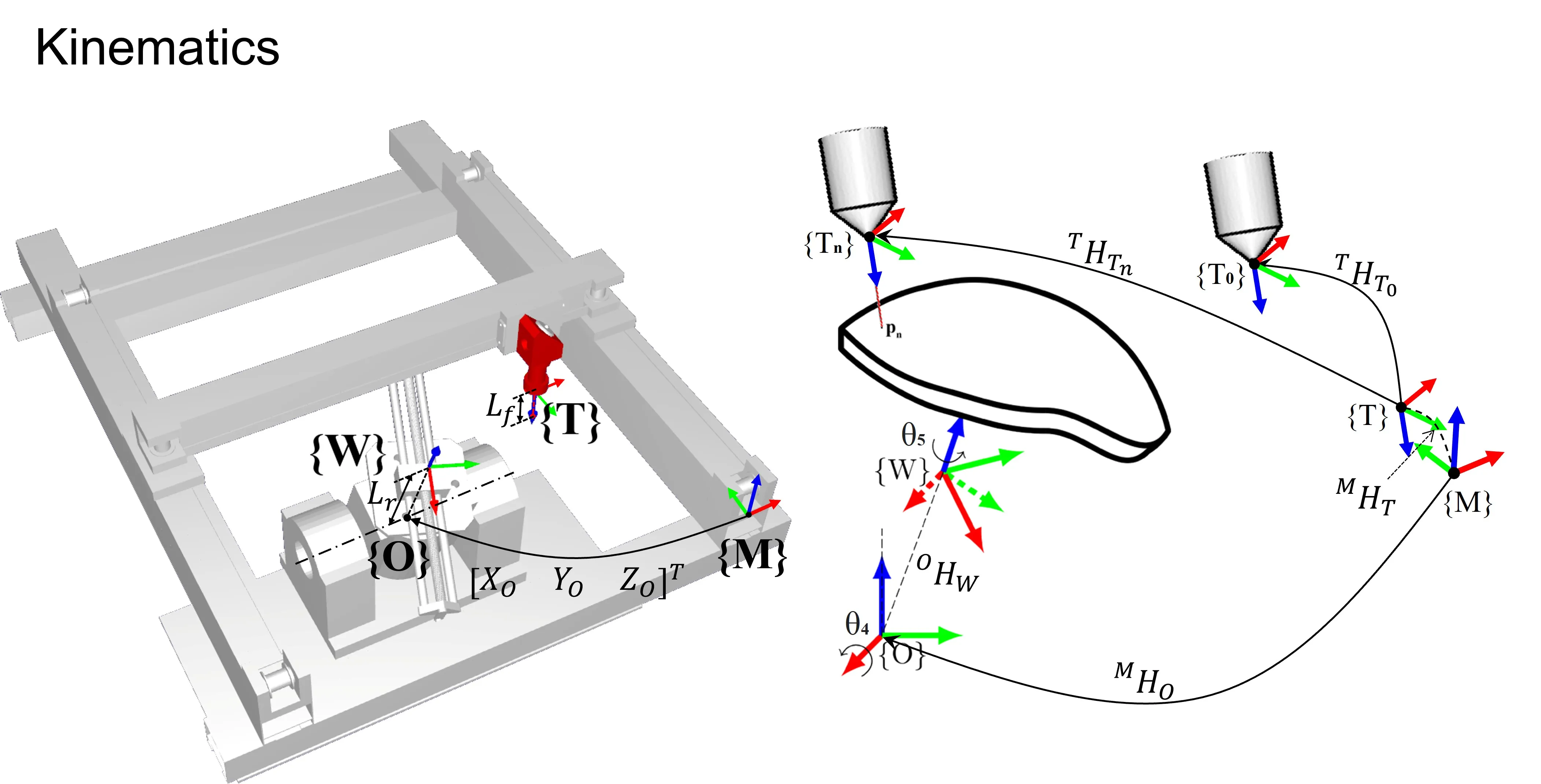
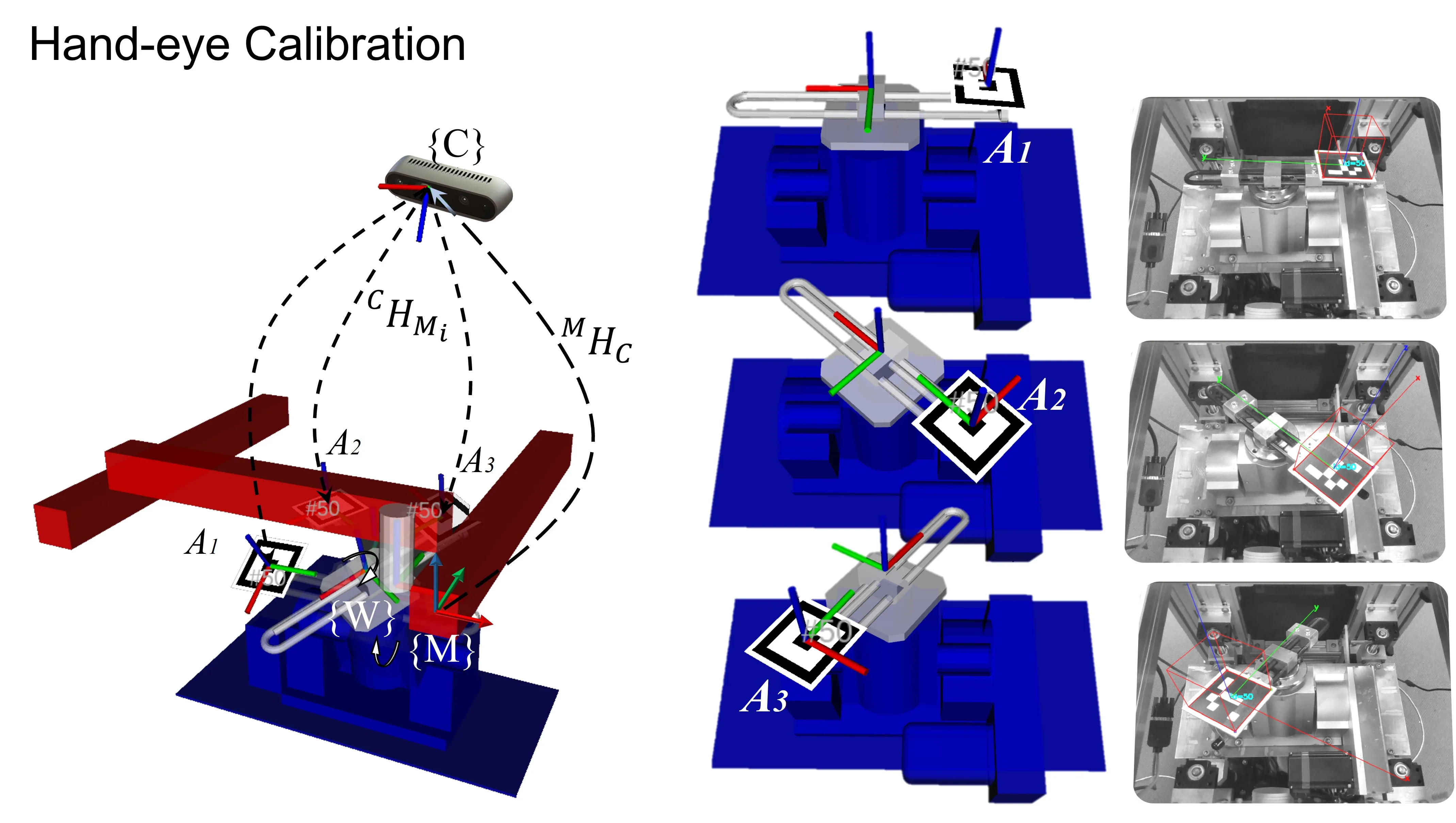
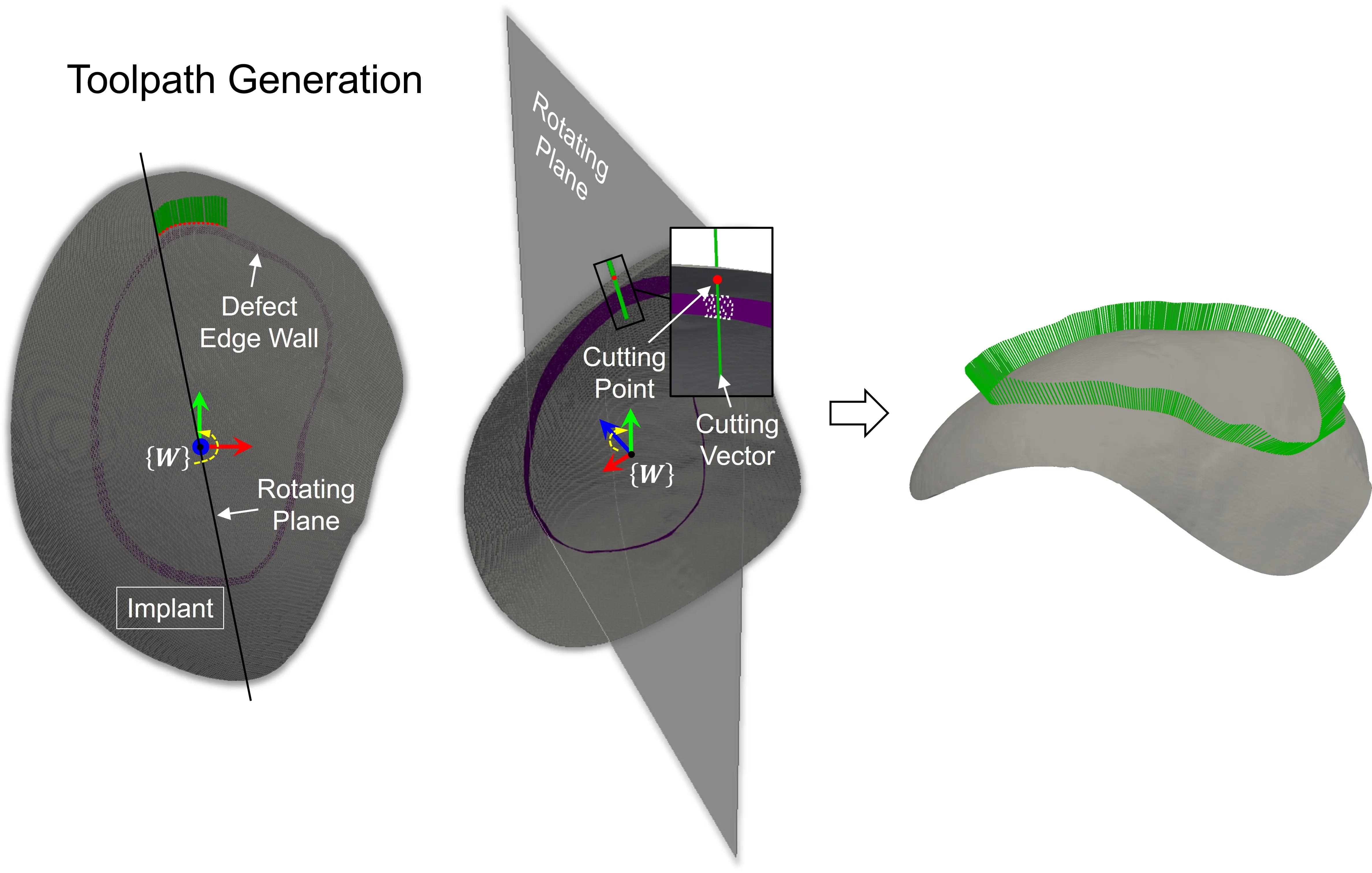
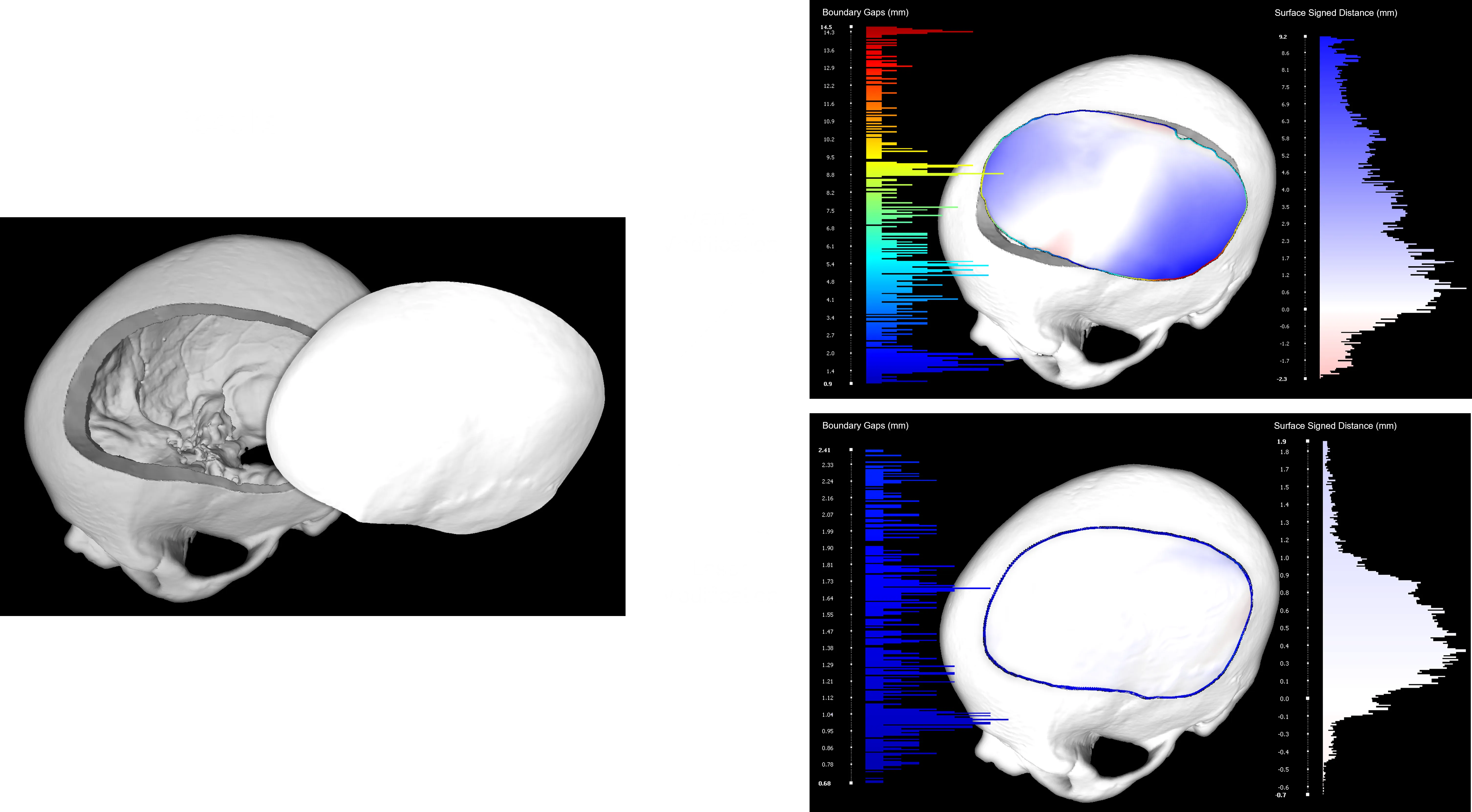
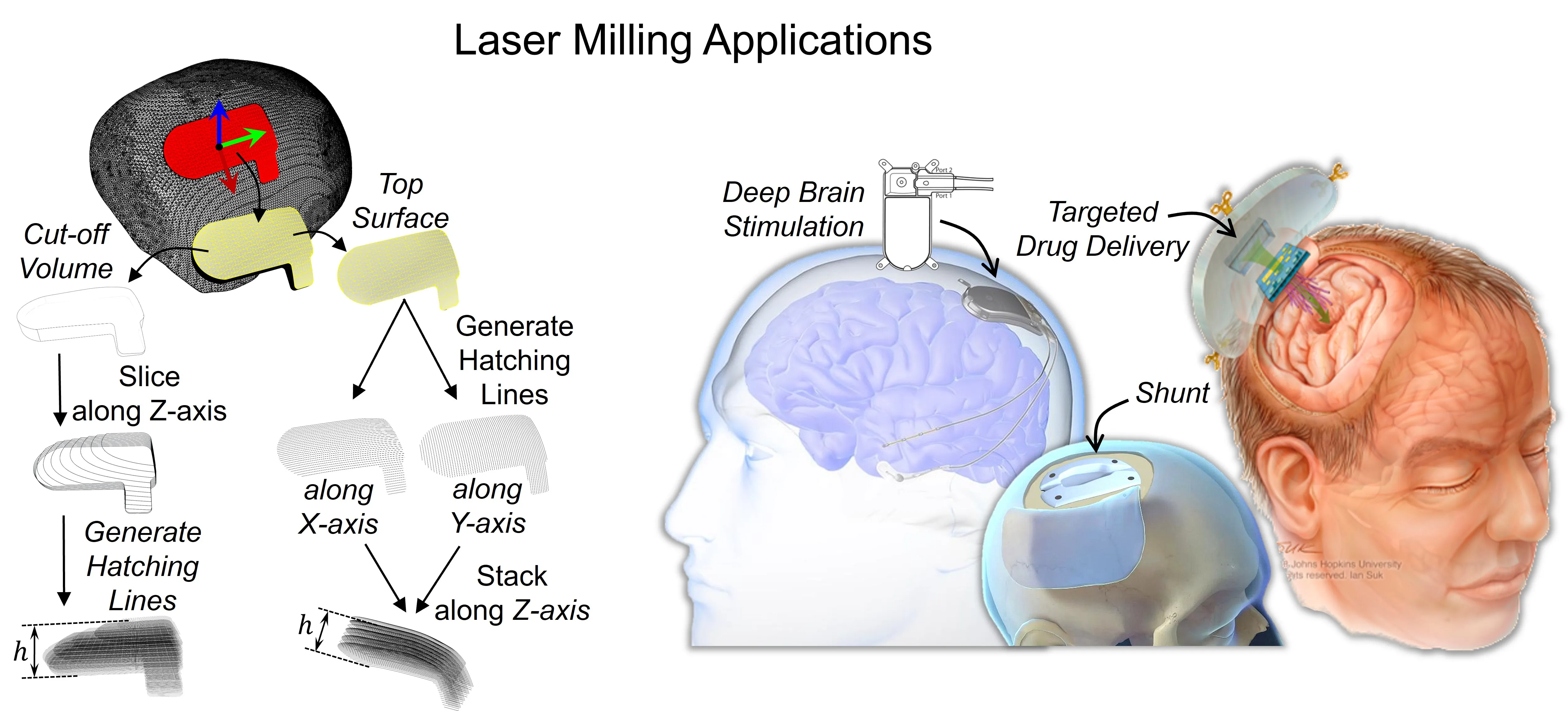
5-Axis Laser Cutting System for Cranial Implants Modification
2016 Spring - 2021 Spring
Designed and developed a laser cutting robot for intraoperative cranial implant modification.
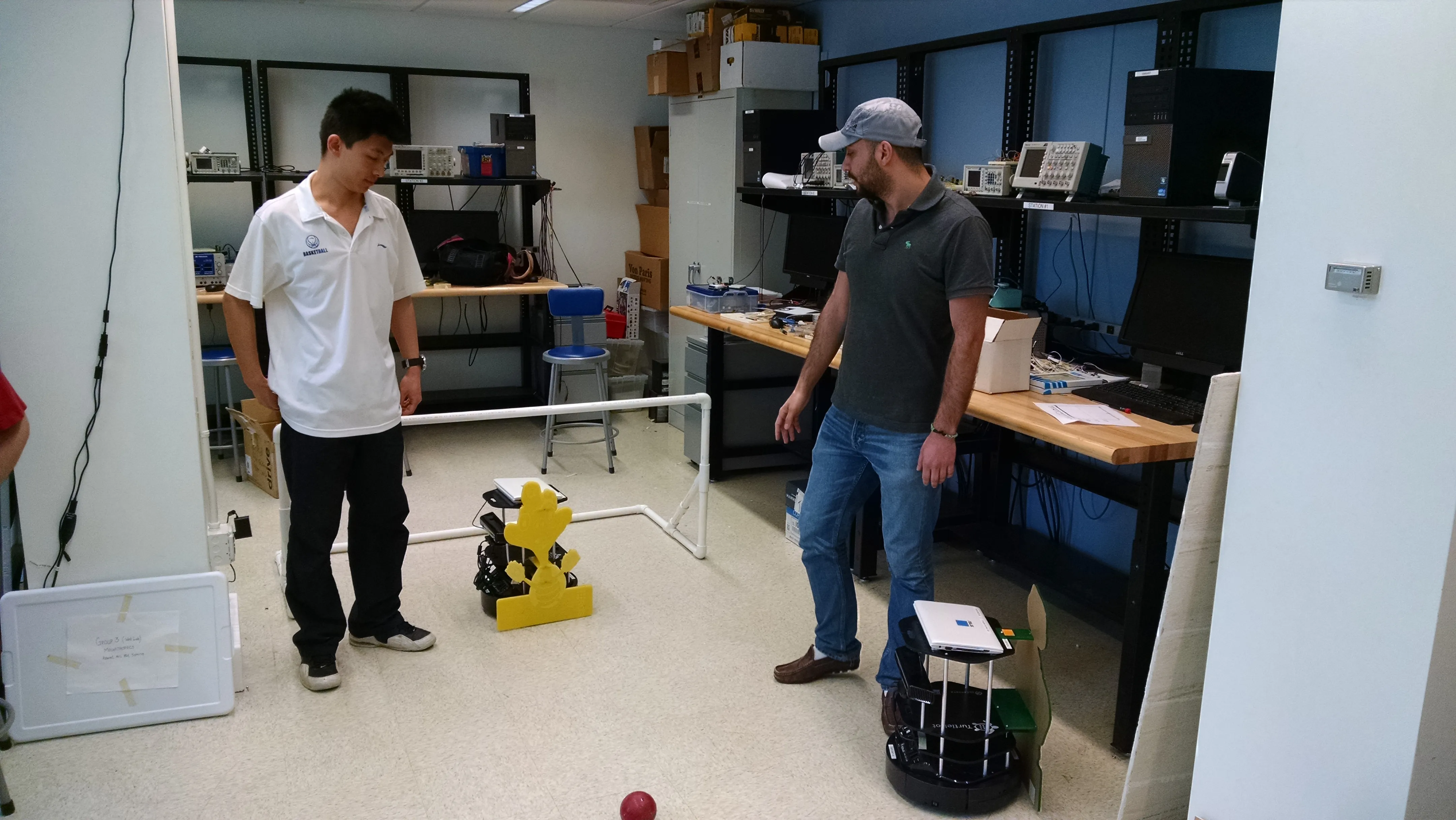
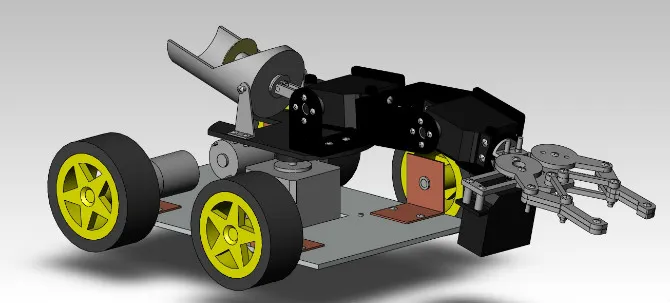
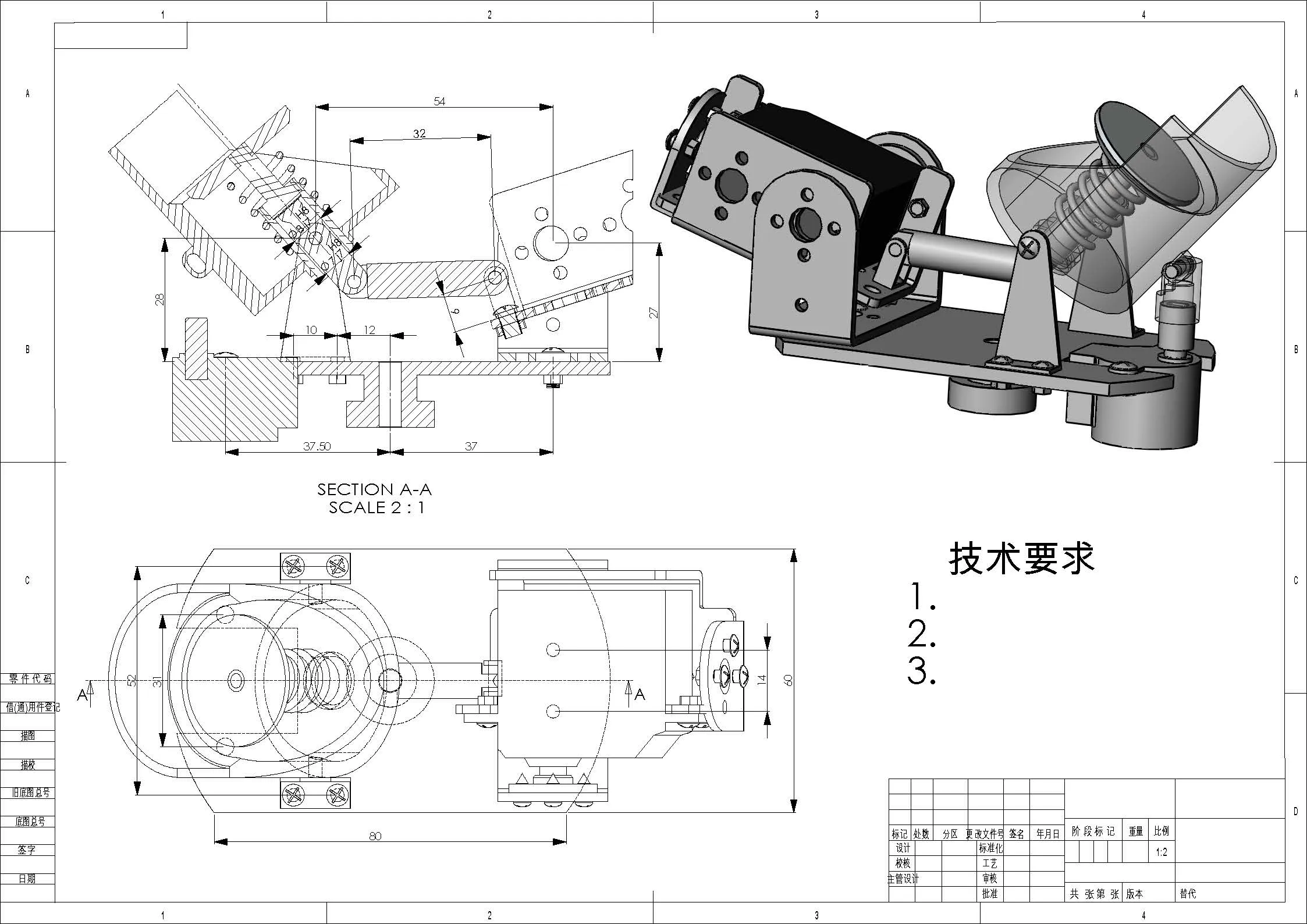
SoccerBot: Turtlebot-based Soccer-Playing Robots
2015 Spring
Designed and built autonomous robots capable of playing soccer game, integrating user input, motion planning, and control.
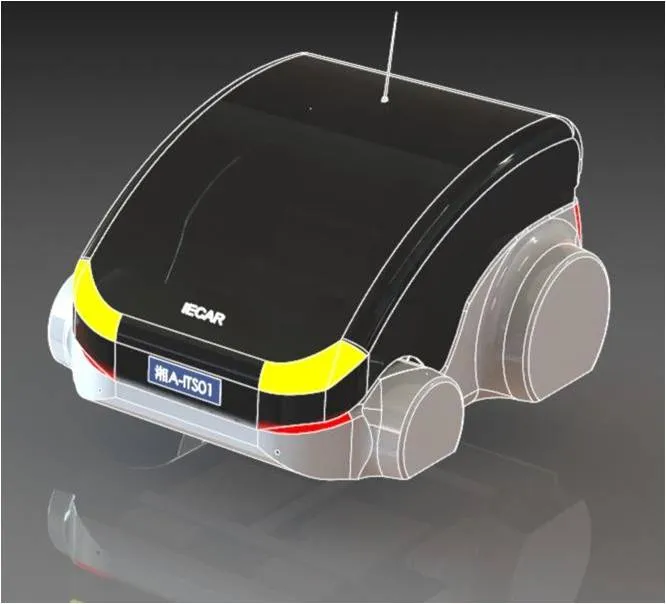
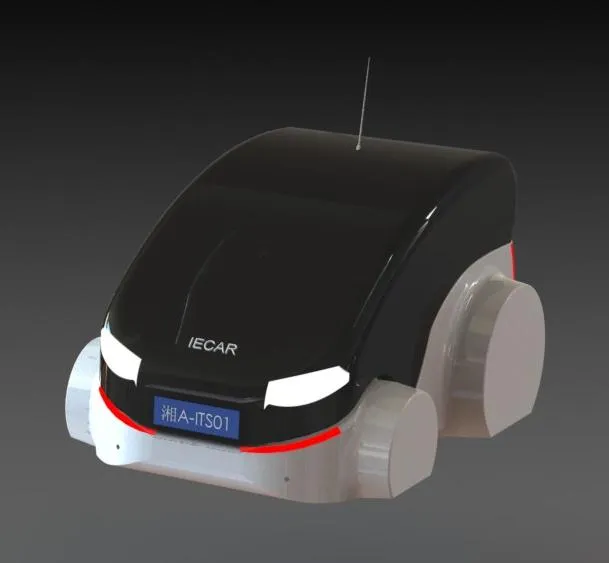



iECar: Controller Design of BLDC Motor for Electric Vehicles
2012 Fall - 2013 Spring
Designed and implemented a controller for a brushless DC motor used in electric vehicles, focusing on efficiency and performance.




/ Tech Stack
Breakdown of my technical skills, categorized by domain and proficiency
Robotics & Autonomy

Programming
Sensors & System Integration



Simulation

Engineering & Prototyping

/ Contact Me
Please feel free to reach out to me.