Medical Robotics
Image-Guided Robotic Orthopedic Surgery
Aug 2022 - Oct 2024
ROS2 Image Processing Surgery Robotics
/ Overview
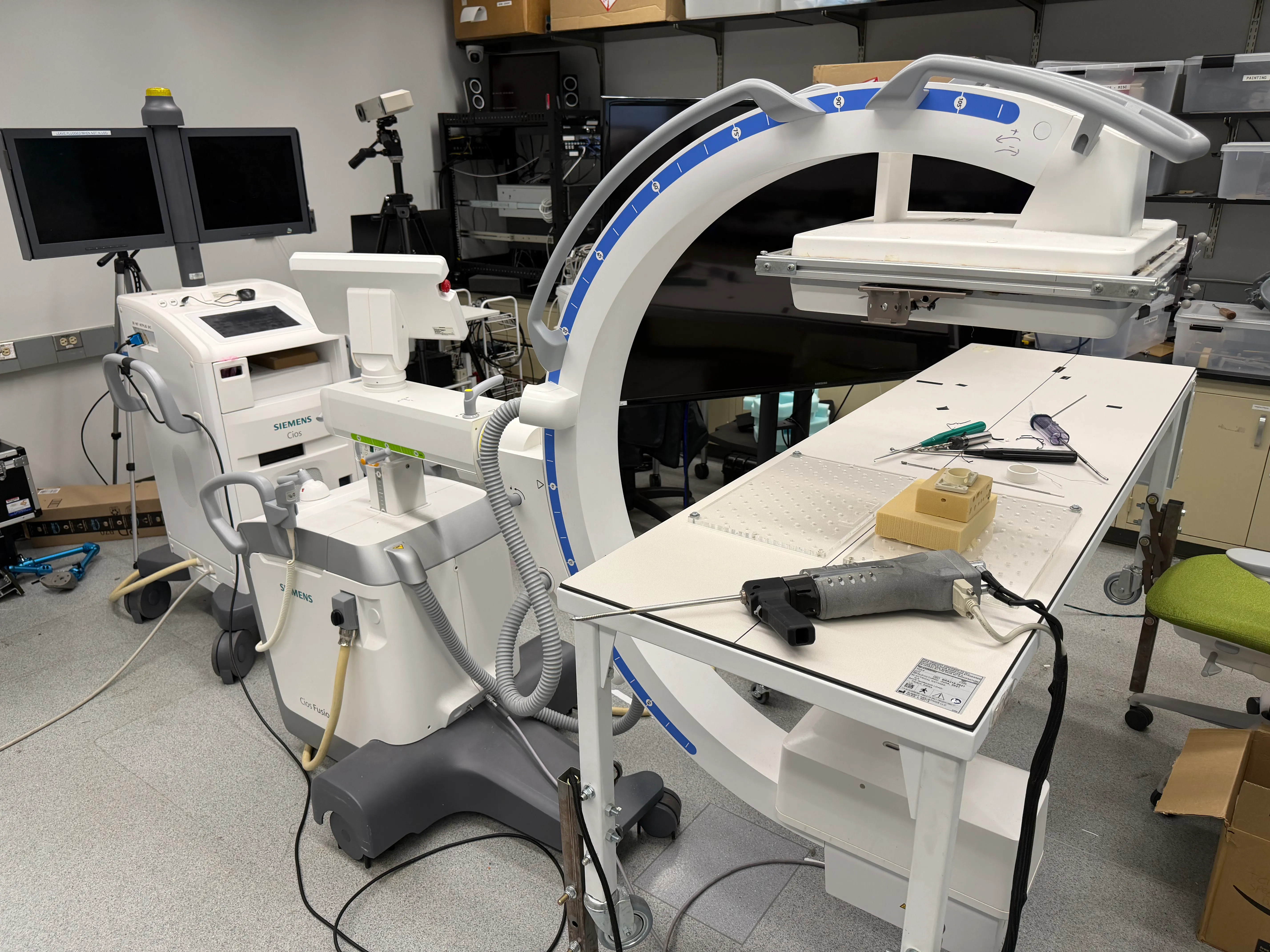
Developed an image-guided robotic system for robot-assisted orthopedic surgery. The system integrates a continuum dexterous manipulator (CDM) with real-time image guidance to enable precise and minimally invasive surgical interventions.
/ Key Contributions
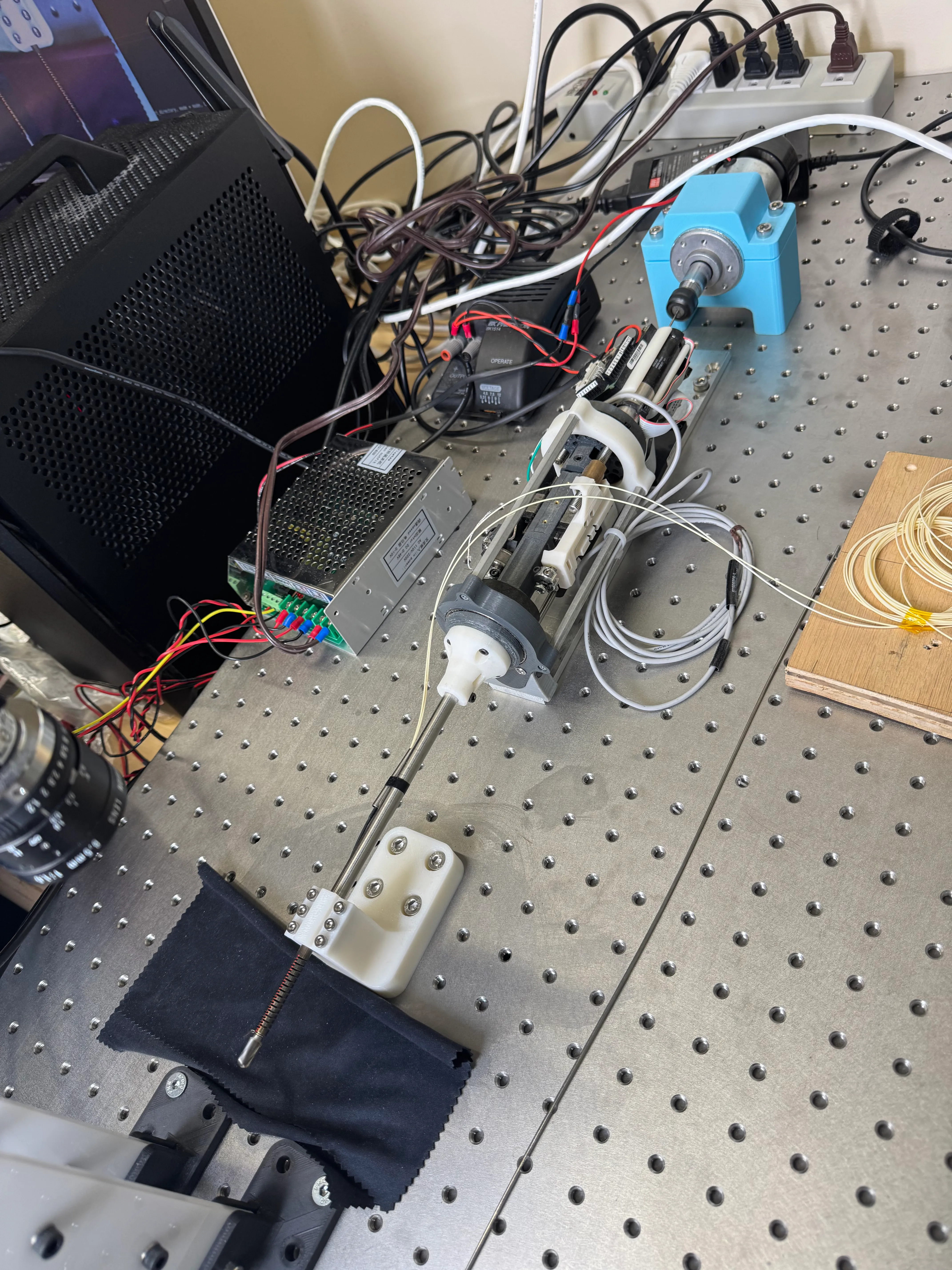
- Designed the CDM actuation system and integrated FBG sensors for real-time shape sensing
- Developed Siemens C-arm URDF for ROS2 to enable real-time image guidance in robotic surgery
- Implemented ros2_control for the CDM actuation and integrated with UR robot
Links
Tech Stack
ROS2 Image Processing Surgery Robotics