Medical Robotics
Robotic Teleoperation for Ultrasound Scanning
July 2025 - Present
ROS2 Zenoh F/T Sensor Haptics Teleoperation Constrained Control AR/VR
/ Overview
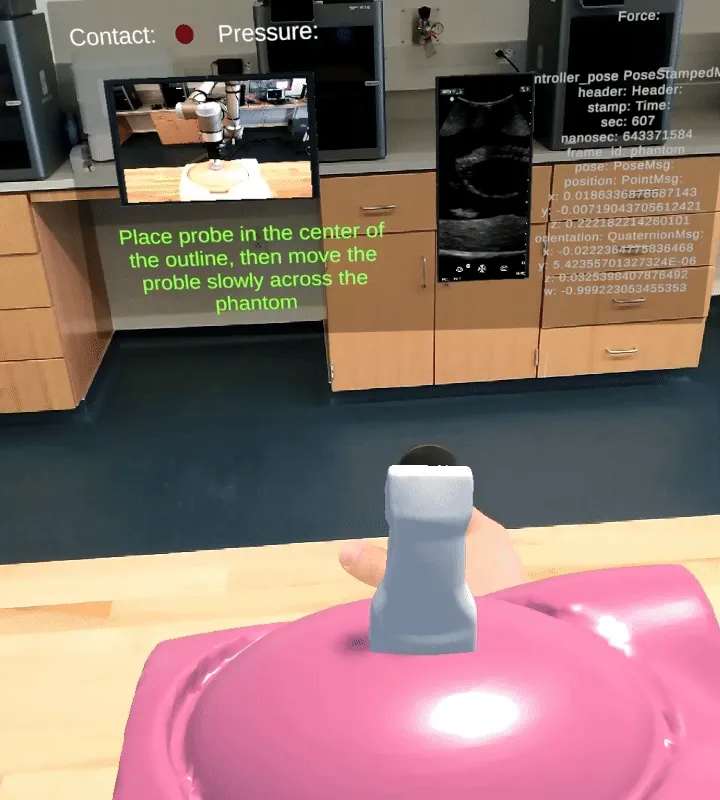
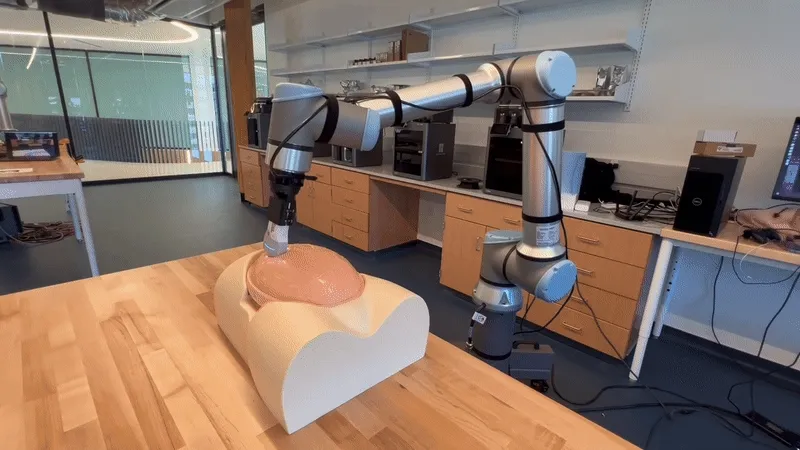
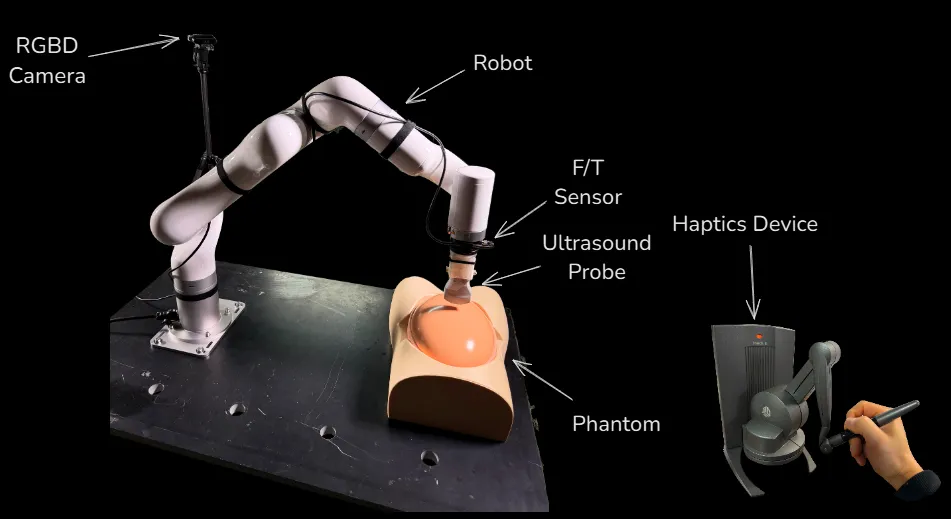
This project focuses on the development of a teleoperation system for ultrasound scanning, enabling safe and effective remote control of the ultrasound probe with haptic feedback. The system integrates force/torque sensors to provide haptic feedback to the operator, enhancing the teleoperation experience and performance. The capabilities of the system are demonstrated through AR/VR applications.
/ Key Contributions
- Designed and implemented a teleoperation system for ultrasound scanning, enabling safe real-time remote control of the ultrasound probe with haptic feedback
- Integrated force/torque sensors to provide haptic feedback to the operator, enhancing the teleoperation experience and performance
- Demonstrated the system's capabilities with AR/VR.
Links
Tech Stack
ROS2 Zenoh F/T Sensor Haptics Teleoperation Constrained Control AR/VR