Robotics
Robot Catcher
Oct 2024 - April 2025
ROS2 Computer Vision Real-Time Tracking & Control Kalman Filter Motion Planning
/ Overview
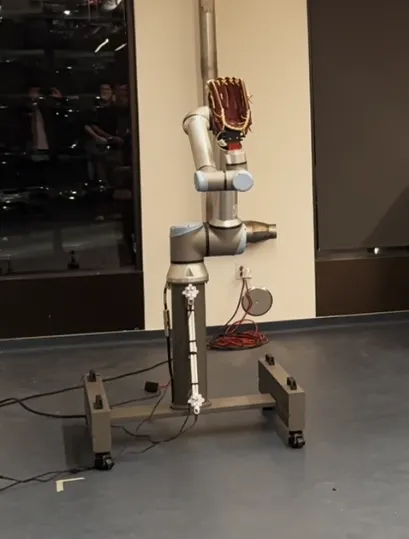
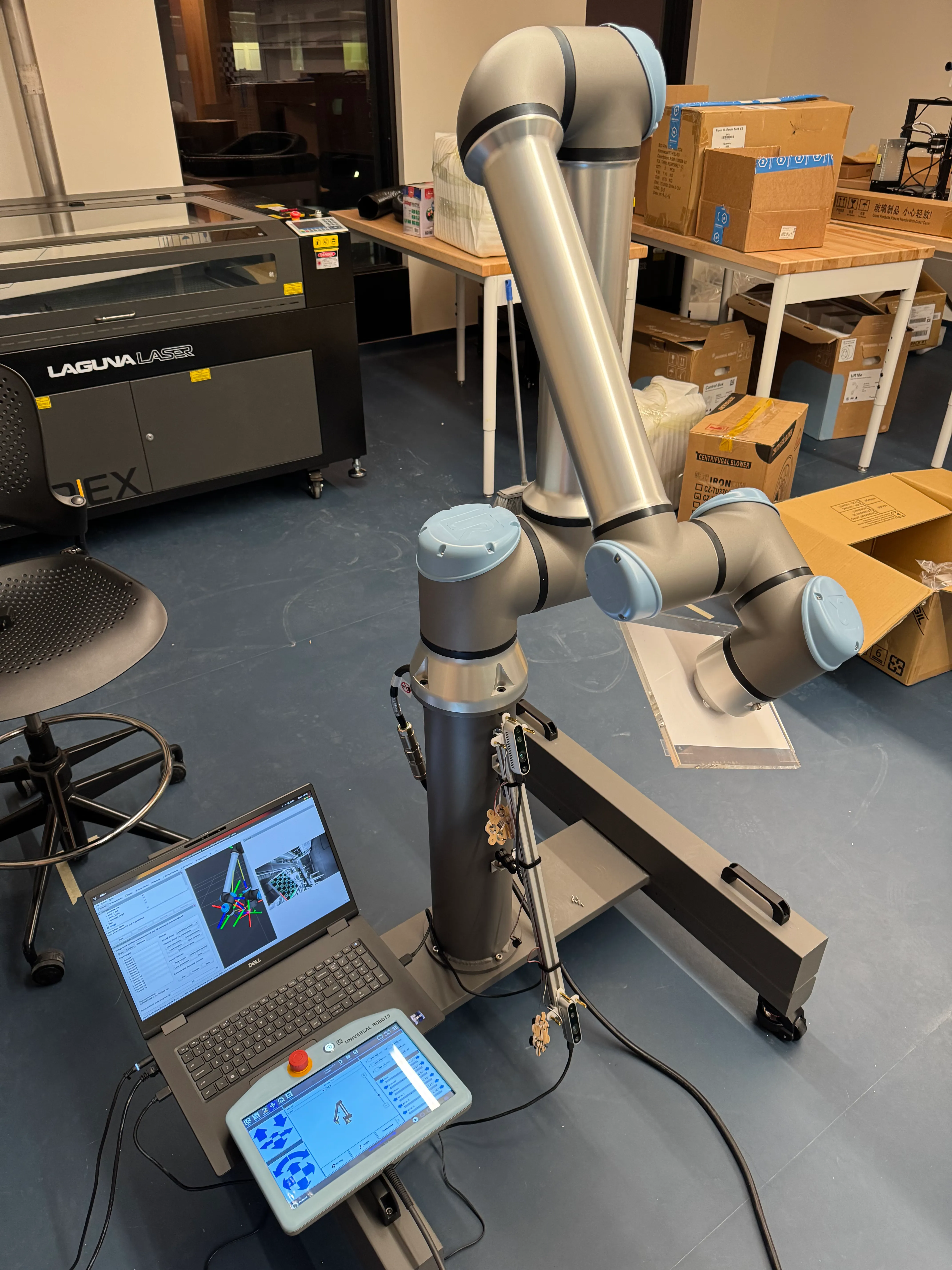
This project involved designing and implementing a robotic system using a Universal Robots (UR) arm to catch a flying baseball in real time. The system integrates ros2_control, stereo IR vision for ball tracking, and real-time motion planning to enable the robot to intercept and catch the ball. The project demonstrates the capabilities of ROS2 in handling real-time robotic applications and the potential for advanced perception and control in dynamic environments.
/ Key Contributions
- Implemented a real-time ball tracking system using stereo IR vision
- Developed a ros2_control architecture for the UR robot to execute precise and timely movements to catch the ball
- Integrated a Extended Kalman Filter for ball trajectory prediction and robot motion planning
Links
Tech Stack
ROS2 Computer Vision Real-Time Tracking & Control Kalman Filter Motion Planning